Seite 816 von 1010
#12226 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 25.06.2012 21:35:52
von Michael Brakhage
oled und promicro gehen einwandfrei! sogar mit 3,3v!
#12227 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 25.06.2012 21:47:43
von el-dentiste
Jo
Sag ich doch


- prooled.JPG (1.49 MiB) 1403 mal betrachtet
#12228 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 25.06.2012 22:08:18
von Jingej
el-dentiste hat geschrieben:Was ging nicht?
Oled?
nein, der code vom regler-einlernen in der config.h
das oled ging nich weil ichs falsche hab... hab heut ein neues bestellt, das aus deinem link
#12229 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 25.06.2012 22:43:45
von Schachti
ein fliegendes üei

#12230 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 25.06.2012 23:09:06
von S.Ziegler
@qwery, für mich sieht es auch so aus als ob alle Motoren verkehrtaufen.
Kann aber auch täuschen und ob sich der copter dann so verhält, weiß ich nicht!
Aber du sagst ja das Sie richtig laufen.... Hmmmm
#12231 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 25.06.2012 23:11:22
von Crizz
Ich verlaß mich jetzt mal drauf das er das am laufenden Motor mit dem Finger geprüft hat, das die richtig laufen.
Wie gesagt, Reglerweg einlernen - und zwar nicht über ein Tool, sondern direkt am Gaskanal des EMpfängers. Und : MaxThrottle-Wert erhöhen ( der steht immer auf 1850 im Sketch , den gleich auf 2000 ) und MinThrottle ruhig mal 20...50 Punkte hochschrauben. ( in der Config.h )
#12232 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 26.06.2012 00:19:40
von qwerty2011
Vorne links dreht CW, vorne rechts dreht CCW, hinten links dreht CCW, hinten rechts dreht CW.
Hab MaxThrottle auf 2000 und MinThrottle auf 1250. Der Copter gibt jetzt wie erwartet schon idle mehr gas und wenn man Throttle erhöht gibt er auch deutlich mehr gas als zuvor, ist aber noch unkontrollierbarer -> überschlägt noch schneller.
Es kommt auch zu plötzlichen Gasschüben. (Die gabs auch schon vor dem Erhöhen der Werte) Wenn man Yaw/Nick/Roll Befehle gibt, hebt er sporadisch ab und man kann ihn mit Mühe für ein paar Sekunden in der Luft halten. (Bis ein Gasschub in eine Richtung kommt und er auf dem Kopf landet)
Kann das mit den Vibrationen des Frames zusammen hängen?
So sehen die Sensordaten aus: (Idle)
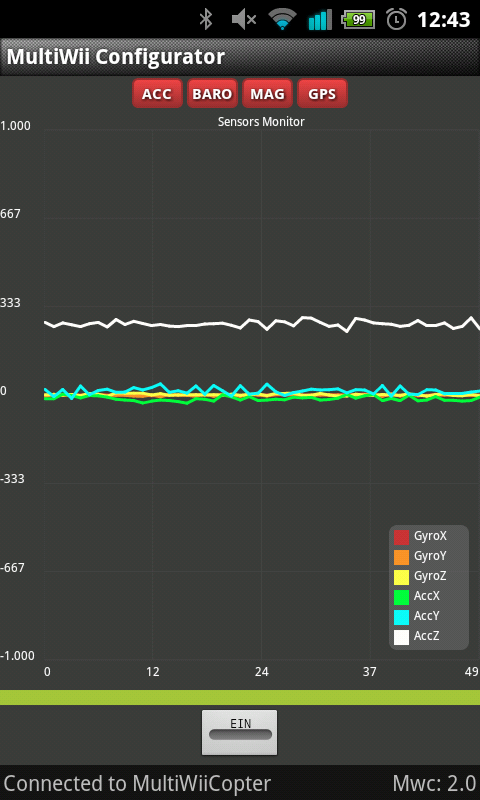
- 2012-05-27 12.43.57.png (76.83 KiB) 1361 mal betrachtet
Mit Throttle:
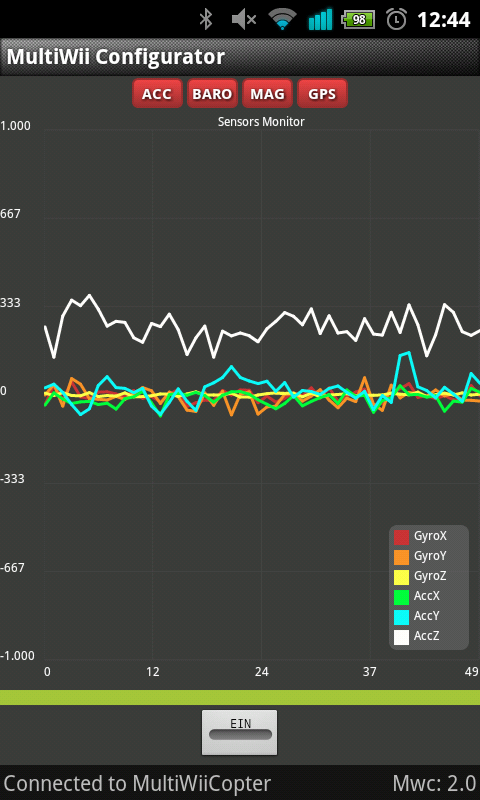
- 2012-05-27 12.44.08.png (94.31 KiB) 1361 mal betrachtet
#12233 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 26.06.2012 00:40:02
von r0sewhite
Häng den Copter doch mal an die GUI und schau Dir in Zahlenwerten den Output auf die einzelnen ESC bei Vollgas an.
@all: Ich hab heute mal etwas gebastelt. Die Idee ist nicht auf meinem Mist gewachsen. Ich habe letztens irgendwo davon gelesen und fand es gut. Der Nadelhalter funktioniert erstklassig bei Testpoints ebenso wie direkt auf den Beinchen des Atmega. Die Griffe sind mit Schrumpfschlauch isolierte Messingstäbe, die genügend Gewicht haben, um die Nadeln auf die Pads zu drücken. Meine Klemmbacken für die ESC muss ich nochmal neu machen. Für dickere Brocken wie diesen sind sie zu flach.


#12234 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 26.06.2012 00:50:08
von mrkobra79
Gute arbeit,sieht echt gut aus.
#12235 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 26.06.2012 00:59:34
von muggel117
So gesehen ja schon schick gemacht Tilman!
Aber ich habe heute nochmal 4 BlackMantis 12A /HobbyKing BS 12A geflasht und muß sagen, mit ein wenig Übung geht's auch mit Löten recht schnell.
Wenn ich das "Aufbauen" vorher nicht mit rechne (als Netbook mit AVR, Netzteil, Lötstation usw. an den Arbeitsplatz schaffen und anschließen) brauche
ich pro ESC 10 Minuten.
In diesen 10 Minuten ist alles mit drin. Also ESC "auspacken", 5 Leitungen anlöten (GND geht ja über den Servoanschluß), Netzteil anklemmen,
Flashen, Min/Max-Throttle einlesen, Probelauf, Kabel ablöten und letzter Problauf mit anschließendem Beschriften ob CW oder CCW.
#12236 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 26.06.2012 01:16:49
von qwerty2011
Die Balken für den ESC Output springen sobald man etwas Gas gibt wild auf und ab.
#12237 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 26.06.2012 01:17:02
von r0sewhite
Frank, na klar geht es auch ohne. Beim Großen Atmega8A hab ich auch keine Probleme mit dem Löten, ich hab gestern auch nur knapp 1 Stunde für 4 Black Mantis 12A gebraucht. Doch spätestens beim kleinen 8L wird es für mich extrem fummelig. Geht zwar zur Not auch zu löten, muss aber nicht sein.
#12238 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 26.06.2012 01:18:50
von r0sewhite
qwerty2011 hat geschrieben:Die Balken für den ESC Output springen sobald man etwas Gas gibt wild auf und ab.
Möglicherweise einfach viel zu hohe PID-Werte, dass die FC so stark auf die Vibs reagiert?
#12239 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 26.06.2012 08:43:18
von Rastazasta
Morgen!
Kurze Frage...
Kennt jemand Motorhalterungen zu den normalen Aluprofilen? Ich mache mir
diese hier immer selbst und habe das Bohren bei dem Motor einfach satt

#12240 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 26.06.2012 09:36:18
von ronco
hi,
habe grad eine zitter freie gimbal steuerung für den mega in multiwii gebaut

das wird auch in der nächsten dev und in 2.1 sein .. aber hab mal eine unoffizielle dev draus gemacht

basiert auf dem was jetzt grade im shared trunk ist ..drin sind HW PWM gimbal und die änderungen am nanowii kram (d4 als stat. led und gefixtes tri servo)
um das HW PWM gimbal zu aktivieren müsst ihr in der config MEGA_HW_GIMBAL anmachen .. also zusätzlich zu SERVO_TILT
Code: Alles auswählen
/**************************************************************************************/
/*********************** motor, servo and other presets ***********************/
/**************************************************************************************/
/* motors will not spin when the throttle command is in low position
this is an alternative method to stop immediately the motors */
//#define MOTOR_STOP
/* some radios have not a neutral point centered on 1500. can be changed here */
#define MIDRC 1500
/*********************** Servo Refreshrates ***********************/
/* Default 50Hz Servo refresh rate*/
#define SERVO_RFR_50HZ
/* up to 160Hz servo refreshrate .. works with the most analog servos*/
//#define SERVO_RFR_160HZ
/* up to 300Hz refreshrate it is as fast as possible (100-300Hz depending on the cound of used servos and the servos state).
for use with digital servos
dont use it with analog servos! thay may get damage. (some will work but be careful)*/
//#define SERVO_RFR_300HZ
/*********************** HW PWM Servos ***********************/
/* HW PWM Gimbal for Arduino Mega.. moves:*/
//Pitch = pin 44
//Roll = pin 45
// this reduces the PWM resolution for all other servos to 8 bit
//#define MEGA_HW_GIMBAL
für digital servos kann man die refresh rate rhuig auf 300Hz stellen
und hier der download
http://www.4shared.com/zip/zYxXaCqP/Mul ... 10626.html (der blaue nicht der grüne
)
edit: jaja wir haben nochnet 2021

gruß
Felix