Seite 907 von 1010
#13591 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 15.09.2012 13:47:46
von Cronos
Stehe grad vor folgender Entscheidung und grübel seit zwei Wochen...
Hexa mit 72cm Welle zu Welle (komm auf ca. 2,2kg mit Cam und Lipo) ausrüsten mit:
Suppo A2212/13 1000kv - Schub...? (kein Datenblatt mit Schubangabe gefunden... schätze mal 800g max. 10x4,5 an 3S) Kosten für die Motoren ~ 90€
T-Motor MT 2216 900kv (max. 11x7 an 4S Schub an 3S 1120g) Kosten für die Motoren 219€ - will ich die aber 4S fligen brauch ich auch wieder teurere Regler...
Würdet ihr für den Anfang erstmal die SUppo kaufen, oder gleich die T-Motor draufpacken? - teurer geht halt immer, nur wenn ich immer so entscheide kostet mich dat Ding am Ende das Doppelte

Die Frage is halt ob mir ~ 4,8 kg Schub reichen bei 2,2 kg Abfluggewicht.... sicher reichts... aber wenn ich auch 7kg Schub haben kann

(jaa.... dicker ist nicht immer besser *hust)
#13592 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 15.09.2012 14:24:53
von muggel117
Wenn du Daten zu diversen Motoren brauchst, schau mal HIER ->
http://www.microcopters.de/artikel/mult ... en-im-test
Demnach bringen die Suppo 2212/13 980g mit 10er Latten.
Ich habe die 2212/13 erst auf einem 50er Quad gehabt, jetzt sind sie auf einem 48er Y6. Die Dinger sind der Hammer für den Preis!
Nur 10er Latten packe ich nicht mehr drauf. Die einfachen (schwarzen) von Flyduiono sind mir da drauf laufend an der Wurzel gebrochen.
Jetzt benutze ich die 9x4.7 von Flyduino, und die halten (sind an der Wurzel viel dicker/stabiler).
Damit macht der Motor 820g an 3S - kommt richtig gut auf dem Y6

...
#13593 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 16.09.2012 16:43:33
von Cronos
Hmm.. 820g würd schon reichen. Aber ich denk auch mal, dass dein Y6 leichter ist, als es der Hexa wird.
Und 9" Probs.... die sehen auf dem richtig verloren aus
aber ich glaub, ich probier die Suppo trotzdem mal.
#13594 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 17.09.2012 10:48:50
von aBUGSworstnightmare
Hi Leute,
zur Zeit kommen immer mehr Fragen zum Thema microWii + GPS (z.B. Rushduino).
Ihr alle seid einfach zu schnell für mich! Wie man an den 5V I2C-Bus rankommt steht schon in der neuen Rev des microWii User's Manuals. Ich bin aber noch nicht dazu gekommen das hochzuladen.
Der 5V Bus ist an den (5V Pull-Up) Widerständen R5 (SDA) und R6 (SCL) zugänglich.
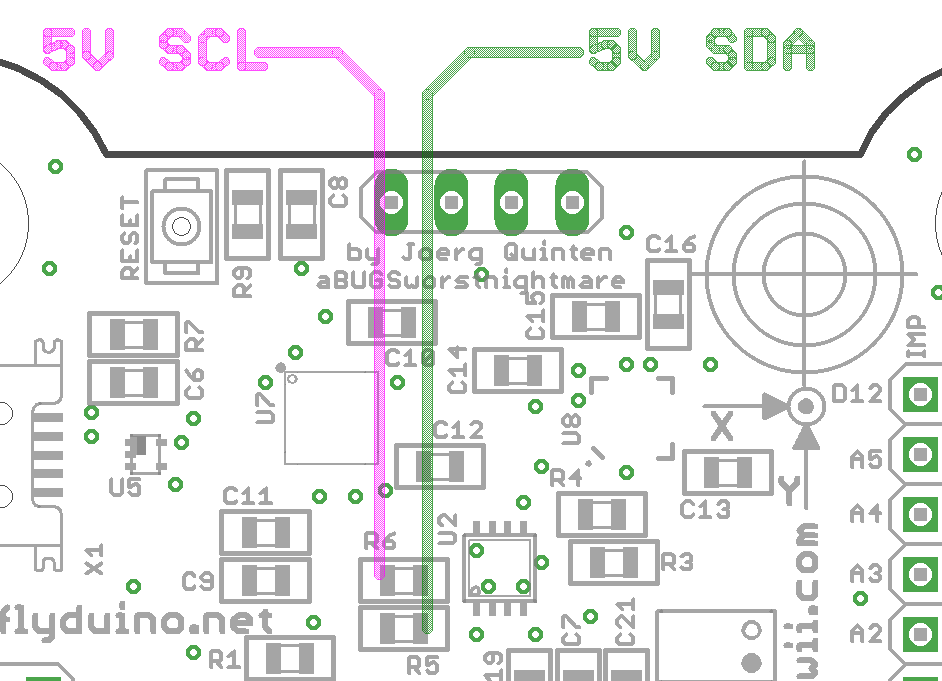
- microWii 5V I2C Interface
- 5V I2C interface microWii.png (29.84 KiB) 2045 mal betrachtet
Wer also ein 5V GPS - z.B. das bereits genannte Rushduino - nutzen will kann hier die Datenleitungen anlöten. Spannungsversorgung z.B. an RX-Eingang abgreifen. Levelschifter wird keiner benötigt!
Gruss
Jörg
P.S. ebenfalls im microWii Thread geposted!
#13595 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 17.09.2012 11:15:10
von Cronos
Ich trau mich kaum noch zu fragen, weil ich die letzten Tage so viel gepostet hab... aber ich brauch trotzdem nochmal Euren Rat.
Leidiges Thema: Mein Quad schaukelt sich beim Sinkflug - und beim Abfangen aus nem Sinkflug auf.
Motoren: T-Motor MS2212 980KV
Regler 25A Simon K
9*4,7 Luftschrauben
Abfluggewicht knapp 800 Gramm bei 41cm Diagonale.
Der Copter steht zwar noch recht stabil in der Luft, aber er braucht ewig, bis mal wieder Schub da ist.
Der Effekt ist so stark, dass ich ihn selbst bei gemässigtem Sinkflug manchmal erst 1-2 Meter überm Boden davon überzeugen kann mal wieder Höhe zu gewinnen.
Bei allen Manövern, die nicht mit sinken zu tun haben ist er absolut ruhig und präzise. Props sind gewuchtet und ich fliege zur Zeit mit PID defaults.
Sollte ich vielleicht mal den D-Wert runter setzen?
Im Endeffekt kann ich, sobald ich sinke, kein ordentliches Manöver fliegen, bis ich meine gewünschte Höhe habe.
Jemand nen Tipp?
#13596 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 17.09.2012 11:20:10
von Jingej
Cronos hat geschrieben:Ich trau mich kaum noch zu fragen, weil ich die letzten Tage so viel gepostet hab... aber ich brauch trotzdem nochmal Euren Rat.
Leidiges Thema: Mein Quad schaukelt sich beim Sinkflug - und beim Abfangen aus nem Sinkflug auf.
Motoren: T-Motor MS2212 980KV
Regler 25A Simon K
9*4,7 Luftschrauben
Abfluggewicht knapp 800 Gramm bei 41cm Diagonale.
Der Copter steht zwar noch recht stabil in der Luft, aber er braucht ewig, bis mal wieder Schub da ist.
Der Effekt ist so stark, dass ich ihn selbst bei gemässigtem Sinkflug manchmal erst 1-2 Meter überm Boden davon überzeugen kann mal wieder Höhe zu gewinnen.
Bei allen Manövern, die nicht mit sinken zu tun haben ist er absolut ruhig und präzise. Props sind gewuchtet und ich fliege zur Zeit mit PID defaults.
Sollte ich vielleicht mal den D-Wert runter setzen?
Im Endeffekt kann ich, sobald ich sinke, kein ordentliches Manöver fliegen, bis ich meine gewünschte Höhe habe.
Jemand nen Tipp?
P so hoch dass er im normal- und schwebeflug kein schwingen zeigt (default ist zu niedrig - ich hab P8)
I so hoch stellen, dass er im geneigtem geradeaus/seitwärtsflug weder weiter kippt noch zurückkippt ohne steuereingaben (ich hab I0,045)
D so hoch stellen dass er nicht zu schwingen anfängt (default ist zu niedrig - ich hab D45)
dann sollte auch das sinken fast schwingungsfrei gehn und das abfangen auch.
#13597 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 17.09.2012 11:24:28
von Cronos
Wie gesagt, alle anderen Manöver gehen ruhig und problemlos - auch Windböhen gleicht er problemlos aus.
Aber ich werd mal mit den Werten hochgehen - hatte nur im Kopf, dass ich bei dem Effekt mit D runter muss - war wohl falsch

Gut, ich "probier" mal etwas rum, vielleicht bekomm ich das behoben

Edit: Bist du bei Roll und Nick mim P Wert auch auf 8?
#13598 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 17.09.2012 13:29:03
von Jingej
Cronos hat geschrieben:Edit: Bist du bei Roll und Nick mim P Wert auch auf 8?
ö, ja... also die werte oben sind die gyro-werte - nicht die vom acc - den benutz ich nicht wirklich und hab da noch nix eingestellt
#13599 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 17.09.2012 14:33:13
von amb
aBUGSworstnightmare hat geschrieben:Hi Leute,
zur Zeit kommen immer mehr Fragen zum Thema microWii + GPS (z.B. Rushduino).
Ihr alle seid einfach zu schnell für mich! Wie man an den 5V I2C-Bus rankommt steht schon in der neuen Rev des microWii User's Manuals. Ich bin aber noch nicht dazu gekommen das hochzuladen.
Der 5V Bus ist an den (5V Pull-Up) Widerständen R5 (SDA) und R6 (SCL) zugänglich.
5V I2C interface microWii.png
Wer also ein 5V GPS - z.B. das bereits genannte Rushduino - nutzen will kann hier die Datenleitungen anlöten. Spannungsversorgung z.B. an RX-Eingang abgreifen. Levelschifter wird keiner benötigt!
Gruss
Jörg
P.S. ebenfalls im microWii Thread geposted!
Danke!!!! Das sollte die Lösung für meine Probleme sein!
Muss ich von oben oder unten abgreifen, oder ist es egal?
#13600 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 17.09.2012 16:53:59
von Michael Brakhage
hi
könnte durchaus auch ein aerodynamischer effekt sein. nennt sich vortex-effekt. deine propeller bekommen die nach unten beschleunigte luft wieder auf der oberseite und dadurch hast du einen strömungsabriß. das kannst du vermeiden indem du leicht zur seite schwebend absteigst! probier mal aus ob es besser geht mit leichter vorwärtsfahrt abzusteigen. muss nicht schnell sein!
wegen diesem effekt ist ein prototyp der osprey v22 abgestürtzt und auch schon macher hubschrauber!
Cronos hat geschrieben:Ich trau mich kaum noch zu fragen, weil ich die letzten Tage so viel gepostet hab... aber ich brauch trotzdem nochmal Euren Rat.
Leidiges Thema: Mein Quad schaukelt sich beim Sinkflug - und beim Abfangen aus nem Sinkflug auf.
Motoren: T-Motor MS2212 980KV
Regler 25A Simon K
9*4,7 Luftschrauben
Abfluggewicht knapp 800 Gramm bei 41cm Diagonale.
Der Copter steht zwar noch recht stabil in der Luft, aber er braucht ewig, bis mal wieder Schub da ist.
Der Effekt ist so stark, dass ich ihn selbst bei gemässigtem Sinkflug manchmal erst 1-2 Meter überm Boden davon überzeugen kann mal wieder Höhe zu gewinnen.
Bei allen Manövern, die nicht mit sinken zu tun haben ist er absolut ruhig und präzise. Props sind gewuchtet und ich fliege zur Zeit mit PID defaults.
Sollte ich vielleicht mal den D-Wert runter setzen?
Im Endeffekt kann ich, sobald ich sinke, kein ordentliches Manöver fliegen, bis ich meine gewünschte Höhe habe.
Jemand nen Tipp?
#13601 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 17.09.2012 17:15:26
von Fabe
so mein nächstes problem steht an.
Habe nun dank neuem gyro ein richtiges signal.
Wenn ich den copter allerdings anlaufen lasse, schaukelt er sich fürchterlich auf. Wollte dann die P und I werte anpassen.
Dabei ist mir aufgefallen, dass wenn ich in der GUI auf "Read" klicke, gar keine werte ausgelesen werden. Auch bleiben alle Felder rot!
Wo könnte hier der fehler liegen ?
Arduino mega pro 2650
3205 gyro
multiwii 2.1 und arduino 1.01
#13602 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 17.09.2012 17:43:25
von Michael Brakhage
hi
versuchs mal mit der win-gui
http://code.google.com/p/mw-wingui/downloads/list
Fabe hat geschrieben:so mein nächstes problem steht an.
Habe nun dank neuem gyro ein richtiges signal.
Wenn ich den copter allerdings anlaufen lasse, schaukelt er sich fürchterlich auf. Wollte dann die P und I werte anpassen.
Dabei ist mir aufgefallen, dass wenn ich in der GUI auf "Read" klicke, gar keine werte ausgelesen werden. Auch bleiben alle Felder rot!
Wo könnte hier der fehler liegen ?
Arduino mega pro 2650
3205 gyro
multiwii 2.1 und arduino 1.01
#13603 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 17.09.2012 18:23:32
von Fabe
OK danke, jetzt liest er die werte auch aus.
Hab mal bei roll und nick 3.0 und 0.03 eingestellt.
Soweit super, allerdings sind die wirkrichtungen vom gyro noch falsch. Sobald ich ihn nur auf roll bewege gibt er nick dazu. Bewege ich ihn auf nick gibt er roll dazu. Ich hab das schon versucht zu ändern wie hier beschrieben
http://www.microcopters.de/artikel/mult ... en#aendern
allerdings hat das keine wirkung.
#13604 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 17.09.2012 18:36:07
von Jingej
Michael Brakhage hat geschrieben:hi
könnte durchaus auch ein aerodynamischer effekt sein. nennt sich vortex-effekt. deine propeller bekommen die nach unten beschleunigte luft wieder auf der oberseite und dadurch hast du einen strömungsabriß. das kannst du vermeiden indem du leicht zur seite schwebend absteigst! probier mal aus ob es besser geht mit leichter vorwärtsfahrt abzusteigen. muss nicht schnell sein!
hm, mag sein... aber hast du mal ein NAZA sinken sehn? da is nix mit schaukeln... irgendwie machen die was besser.,..
#13605 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 17.09.2012 19:42:18
von Michael Brakhage
hi jin
nein ichhabe noch kein naza sinken gesehen. der vortex effekt ist bei manchen ausgeprägter und bei manchen tritt er kaum bis gar nicht auf. sicherlich kann man durch pid tuning einiges wegbekommen. aber wenn du in die beschleunigte luft mit der passenden geschwindigkeit absinkst dann bist du fällig
dann kommt der böse vortex
ich bleibe der multiwii treu. da ich überwiegend nur mit gyro fliege (naja ein wenig fpv fange ich auch an) und viele wenn nicht alle sagen das die multiwii am meisten spass macht bei acro flug.
Jingej hat geschrieben:Michael Brakhage hat geschrieben:hi
könnte durchaus auch ein aerodynamischer effekt sein. nennt sich vortex-effekt. deine propeller bekommen die nach unten beschleunigte luft wieder auf der oberseite und dadurch hast du einen strömungsabriß. das kannst du vermeiden indem du leicht zur seite schwebend absteigst! probier mal aus ob es besser geht mit leichter vorwärtsfahrt abzusteigen. muss nicht schnell sein!
hm, mag sein... aber hast du mal ein NAZA sinken sehn? da is nix mit schaukeln... irgendwie machen die was besser.,..