Seite 133 von 1010
#1981 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 22.01.2011 18:18:15
von guro
@marix (nu auch ohne T

)
irgendwie hab ich den eindruck bei dir stimmt was mit dem EEPROM speicher nicht, da steht wohl zu viel mist drin.
Lad mal die EEPROM_CLEAR.pde aus den examples (in arduinoGUI -> File -> Examples -> EEPROM-> EEPROM_clear) auf deinen Arduino, fürs einmal mit Konsole aus und dann lad mwc 1.5 wieder drauf. Dann sollte das EEprom neu beschrieben werden. Vermutlich sollten dann auch die Probleme weg sein!
Wie groß schlagen den deine GyroWerte in der GUI aus wenn du etwas wackelst?
gruß
#1982 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 22.01.2011 18:28:34
von marix
@ guro,
das T kannst Du behalten.
Hab ein Bild gemacht, Ausschläge scheinen "angemessen", bei leichten Rüttlern. Ist halt schwer, die Intensität der Rüttler zu definieren, stell Dir vor Du spielst Schlagzeug mit geringen Bewegungen.
Die Idee mit dem EEProm hatte ich auch schon, werde Deinen Vorschlag umsetzen.
Wofür ist den der Reset-Schalter auf dem Arduino da?
#1983 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 22.01.2011 18:42:50
von guro
der resetbutton macht nix anderes als den Resetpin des Atmels auf GND zu ziehen und ihn somit zu resetten. Is quasi wie Strom abstecken und wieder anstecken, d.h. er initialisiert alles noch mal von vorne (regler, wmp, nk,...)
#1984 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 22.01.2011 18:49:45
von Crizz
Sagt mal, wenn ihr solche Effekte habt : habt ihr beim ersten anschließen an das GUI auch mal ne Gyro-Kalibrierung gemacht ? Solche wiren Monster-Kurven krieg ich nur bei Ardu´s, die noch keine Gyroreferenz gespeichert haben. Ist nur ein einziges mal erforderlich, ist sogar egal ob der Copter waagerecht steht oder nicht.
Hab bei meinen Coptern heute die Regler auf NiXX-Mode umgestellt, damit ich auch mit P-LiFe fliegen kann. Dabei hatte ich am Terminator ( Gaui 330 ) den Effekt, das ein Motor nicht mehr richtig laufen wollte. Hing extrem hinterher und blieb sogar mittendrin unvermittelt stehen.
Hab da die Programmierung nochmal durchlaufen lassen, und siehe da : er arbeitet wie er soll. Eventuell kann auch das dein Problem mit dem einen faulen Kanal lösen, wer weiß wie der Regler reagiert und was die Elektronik nachschiebt, weil das Ergebnis des Reglers nicht paßt....
#1985 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 22.01.2011 18:56:48
von Hifly
Habe noch Mal meinen IN&PA-V1.6 auf 400kHz zurückgestellt (hatte auf 100kHz gestellt, da Fliegen nicht so doll war und ich die Hoffnung hatte, dass es bei 100kHz besser wird). Intersanterweise werden die großen Ausschläge nach kurzer Zeit "normal".
Crizz hat geschrieben:habt ihr beim ersten anschließen an das GUI auch mal ne Gyro-Kalibrierung gemacht ?
Kalibrierung hat auch nicht geholfen, nur reset.
#1986 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 22.01.2011 19:02:22
von marix
Hallo Crizz,
habe den Motor/Regler an einen anderen Pin angeschlossen, dann hat er korrekt gearbeitet, also Hardware OK.
Habe jetzt den Eeprom gecleant und den Sketch neu aufgespielt, muss dafür immer W7 starten, da die Linuxvarinte uralt ist (Version 0018, ohne Arduino pro mini mit 5V).
Beim Sketch anpassen ist mir aufgefallen, dass ich die Zeile Servo Tilt aktiviert hatte, das habe ich nun auch geändert, war das korrekt?
Des Weiteren habe ich Yaw direction nicht definiert, stimmt das so?
Ergebnis kommt gleich.
Gruß
Marco
#1987 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 22.01.2011 19:04:55
von dynai
hi jungs...
@marix:
Code: Alles auswählen
#define YAW_DIRECTION 1 // if you want to reverse the yaw correction direction (TRICOPTER only)
//#define YAW_DIRECTION -1
also nix für QUAD egal ob in PLUS oder X Konfiguration

mensch wars heute arsch kalt (zumindest gefühlt)
ich bin nachdem ich jetz meine wellen getauscht hab den vibrationen auf den grund gegangen und sie traten immer genau bei knüpple auf knapp über mitte auf, also genau da wo ich das seltsame verhalten hatte...
nachdem mein quad nicht sonderlich groß ist und sich mit etwas kraft auf bei vollgas noch halten lässt hab ich nun alles sogut gewuchtet wies nur ging und kann über das ganze drehzahlbereichs nur noch minimale vibrationen fest-stellen.
nachdem inzwischen auch mein
BMA 020 von ELV gekommen ist hab ich den NK ausgebaut und dem neuen ACC (bma 020) in verbindung mit der PRE 1.6 eine chance gegeben
cycletime ist jetzt bei ca.
4500 (wenn ich nur meine WMP drann hab bin ich bei 3200 drunter komm ich irgendwie nicht, I2C funktioniert auch nur bei 100khz drüber bekomm ich unsaubere signale)
achja und da
POINT65 ja einen fehler beim auslesen des WMP gefunden hat hab ich dessen code auch noch mit eingepflegt
-> alles kurven suuuper flach
verhalten in der luft: kein wackeln, kein zucken alles perfetto

....
naja fast, bei VOLLPITCH drehts mir den quad auf eine richtung aus (yaw), geh ich mit pitch etwas zurück is alles wieder gut
hat einer ne idee??? (1 der luftschrauben hat ne kleine zacke raus... ist aber gewuchtet)
gruß Chris
Hier noch der Code von
POINT65:
Code: Alles auswählen
i2c_WMP_getRawADC();
if ( (rawADC_WMP[5]&0x02) == 0x02 && (rawADC_WMP[5]&0x01) == 0 ) {// motion plus data
gyroADC[PITCH] = - ( ((rawADC_WMP[4]>>2)<<8) + rawADC_WMP[1] );
gyroADC[ROLL] = - ( ((rawADC_WMP[5]>>2)<<8) + rawADC_WMP[2] );
gyroADC[YAW] = - ( ((rawADC_WMP[3]>>2)<<8) + rawADC_WMP[0] );
return 1;
} else if ( (rawADC_WMP[5]&0x02) == 0 && (rawADC_WMP[5]&0x01) == 0) { //nunchuk data
#if defined(ADXL345) || defined(BMA020) || defined(BMA180) || defined(MMA7455L) // Added code
return 2; // Added code
#else // Added code
accADC[PITCH] = - ( (rawADC_WMP[2]<<2) + ((rawADC_WMP[5]>>3)&0x2) );
accADC[ROLL] = ( (rawADC_WMP[3]<<2) + ((rawADC_WMP[5]>>4)&0x2) );
accADC[YAW] = - ( ((rawADC_WMP[4]&0xFE)<<2) + ((rawADC_WMP[5]>>5)&0x6) );
return 0;
#endif // Added code
} else
return 2;
Hier die Bilder von der GUI, vom BMA 020 nebst original WMP, und für die Messwertfanatiker ein kleines Log
#1988 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 22.01.2011 19:09:44
von Crizz
YawDirection und ServoTilt werden eigentlich nur für TriCopter bzw. Gimbal benötigt und haben bei Quads m.W. keine Funktion / Einfluß. Aber das kann wahrscheinlich Yaccu besser beantworten.
#1989 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 22.01.2011 19:11:51
von Crizz
wie wird denn das BMA020 angeschlossen ? Genau wie der NK ? Also Vcc, Gnd, Data und Clock ? Läuft doch auf I²C, oder ?
#1990 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 22.01.2011 19:32:13
von marix
Sooo,
habe nun getestet und geprobt.
Der Motor hinten-links hat einen Drehzahlunterschied von 50-200 Touren zu den anderen, wobei die anderen sich auch unterschiedlich verhalten, mal ist der Motor vorne Links der schnellste, mal der vorne rechts, und die Drehzahlunterschiede schwanken untereinander von init zu init.
Grummel....
Gruß
Marco
#1991 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 22.01.2011 19:58:51
von dynai
Hi,
also der BMA 020 ist halt ne recht günstige alternative zum NK, ist aber technisch scheints nicht mehr der neueste (dokumete auf Bosch Sensortec von 2008) auf der Bosch Seite quasi nicht mehr zu finden.
der BMA180 wäre besser.
Angeschlossen wird er ganz einfach (dank Level-Shifter auf der ELV Platine)
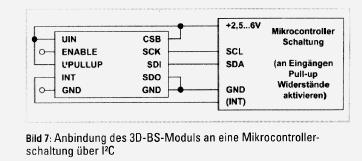
- a3668669-36-bosch-i2c.jpg (12.66 KiB) 1486 mal betrachtet
Leider scheint die I2C auf 100khz begrenzt

naja ich hab ja eh die original wmp werd wohl mit den werten glücklich werden, solangs sauber funktioniert
gruß Chris
P.S: grad gelesen das Point65 weiter mit dem Nunchuck (NK) experimentiert das gibt einem doch hoffnung
#1992 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 22.01.2011 20:02:29
von Jonas_Bln
dynai hat geschrieben:Hi,
also der BMA 020 ist halt ne recht günstige alternative zum NK, ist aber technisch scheints nicht mehr der neueste (dokumete auf Bosch Sensortec von 2008) auf der Bosch Seite quasi nicht mehr zu finden.
Mit 29,01€ ist der BMA180 aber nicht wirklich günstiger ....
http://www.watterott.com/de/Breakout-Board-BMA180
#1993 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 22.01.2011 20:02:43
von calli
kay23 hat geschrieben:hab + und - verdreht weil ich die steckerbelegung für die gegenseite genommen habe.
Hatte ich auch schon... Mein WMP hats überlebt. Naja oder doch nicht?!
Hifly hat geschrieben:habe zwei von diesen WMP. Leider noch nicht richtig zum fliegen bekommen.
Habs geahnt... Voll ins Klo gegriffen. Ich baus wieder zusammen und verticks bei Ebay
C!
#1994 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 22.01.2011 20:04:04
von calli
marix hat geschrieben:Der Motor hinten-links hat einen Drehzahlunterschied von 50-200 Touren zu den anderen, wobei die anderen sich auch unterschiedlich verhalten, mal ist der Motor vorne Links der schnellste, mal der vorne rechts, und die Drehzahlunterschiede schwanken untereinander von init zu init.
Das ist NORMAL auf dem Boden.... Da arbeitet die Controll-Loop schon. nicht Normal ist wenn einer gar nicht läuft oder so.
C
#1995 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 22.01.2011 20:07:32
von dynai
Jonas_Bln hat geschrieben:dynai hat geschrieben:Hi,
also der BMA 020 ist halt ne recht günstige alternative zum NK, ist aber technisch scheints nicht mehr der neueste (dokumete auf Bosch Sensortec von 2008) auf der Bosch Seite quasi nicht mehr zu finden.
Mit 29,01€ ist der BMA180 aber nicht wirklich günstiger ....
http://www.watterott.com/de/Breakout-Board-BMA180
ja deshalb auch der BMA 020 für nich mal 6 euro....
http://www.elv.de/output/controller.asp ... ch=&marke=
der BMA 180 wäre trotzdem besser

gruß Chris