Seite 296 von 1010
#4426 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 10.04.2011 11:26:23
von Crizz
probier mal Rx und Tx zu vertauschen, einige Anbieter beschriften quasi von der falschen Datenflußrichtung betrachtet, dann sucht man sich nen Wolf und es liegt nur daran, das eben die Signalrichtungen wegen verpolung nicht passen. Hatten wir alles schon erlebt.
#4427 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 10.04.2011 11:34:11
von Quaxx
@X-21: Das Geheimnis der Arduino/FDTI-Boardverbindung ist, das 5 Leitungen benötigt werden (außer du bist schnell am Resetknopf des Arduinoboards):
+5V, RX, TX, GND und das Geheimnis DTR!
DTR geht an das Resetpin des Arduino. Die Arduinosoftware resettet das Board zum Programmieren, indem sie das Resetpin über DTR kurzzeitig auf LOW zieht, dann wird der Bootloader auf dem Board gestartet und die Programmierung läuft.
Beim Sparkfun ist das schon vorgesehen, bei den Anderen ist das Lötarbeit...
Steffen
PS: erster Post seit 2/3 Jahren RHF Abstinenz

Edith: Typo
#4428 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 10.04.2011 13:19:34
von Geni
#4429 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 10.04.2011 17:35:18
von X-21
Hi Jungs,
erstmal Danke an Crizz, Quaxx und Geni.
Das Zusammenspiel Eurer Tips hat gefunzt.
1. Tip vom Crizz traf auf eines der FTDI´s zu, hier musste tatsächlich Rx -> Rx und Tx -> Tx verbunden werden.
2. Tip vom Steffen. Es ist eine 5. Leitung notwändig. Beim FTDI heisst sie RTS (ready to sent) beim Ardu heisst sie GRN was immer das heissen soll?
3. Tip vom Geni mit Verweis ins RCLine Forum, mit dem Drücken des Resetknopfes auf dem Ardu konnte ich erstmal feststellen, daß das FTDI funktioniert.
Bin gerade dabei neue, besser gelötete Kabel herzustellen.
Hier schon mal ein Bild einer funktionierenden Verbindung.
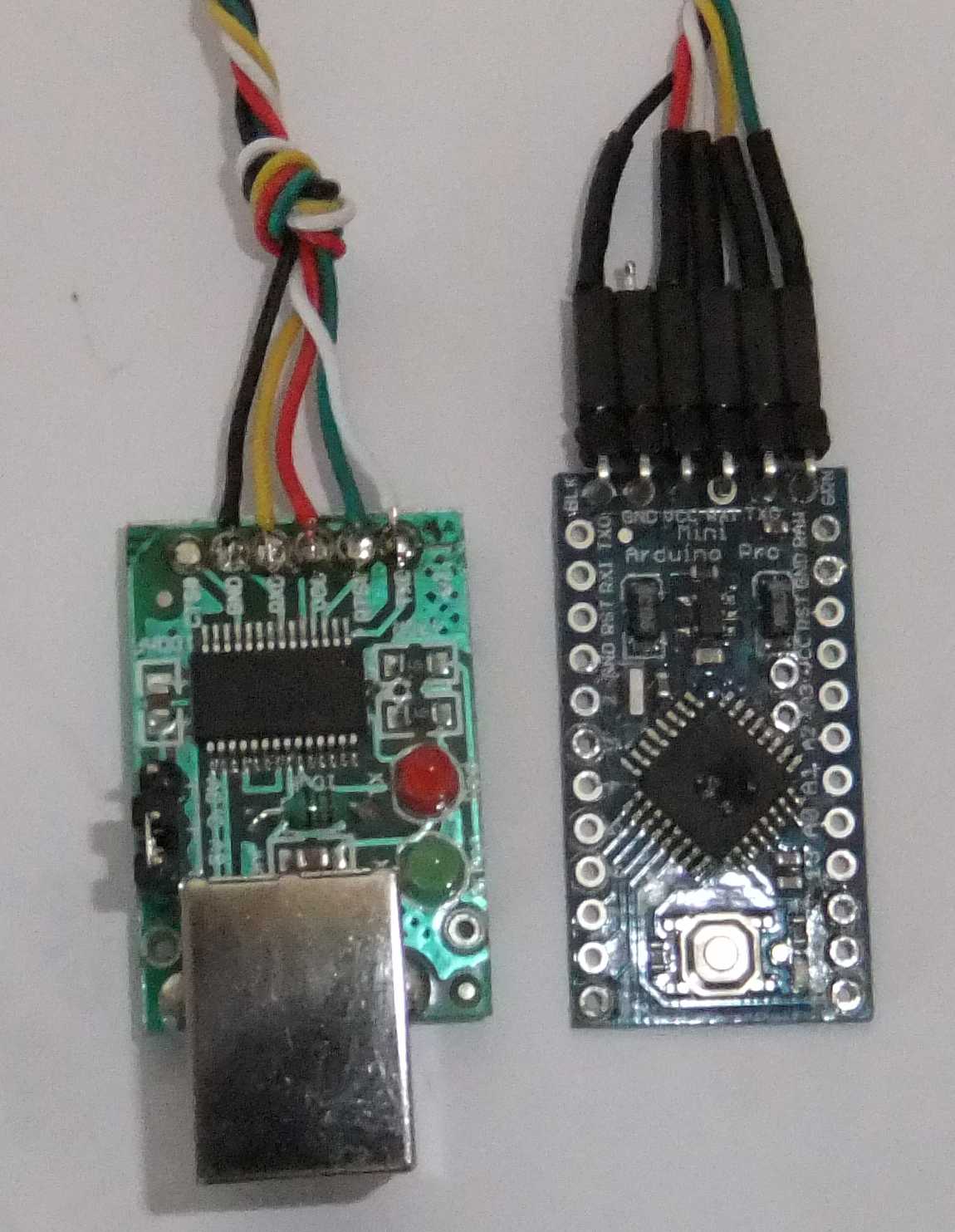
- FTDI-Verbindung.jpg (121.27 KiB) 1111 mal betrachtet
Es funzt so obwohl der GND des Ardu offentsichtlich nicht angeschlossen ist, hat eine interne Brücke auf dem Ardu.
Gruss
Uwe
#4430 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 10.04.2011 18:21:28
von yacco
Wozu braucht man denn soviele FTDIs?

#4431 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 10.04.2011 18:36:34
von Theslayer
Hey,
ich habe jetzt endlich wieder ein bisschen Zeit, um an meinem Wiicopter rumzubasteln und ich will die kommende Woche endlich mal Erstflug machen dürfen

Dabei hab ich aber derzeit ein Problemchen.
Im Arduino und im Gui ist alles fertig eingestellt.
Wenn ich nun die Motoren scharfstelle, fangen sie alle an zu drehen. Dann geb ich ein bisschen mehr Gas (Propeller hab ich abgenommen

) und teste halt mal die lenkbewegungen.
Dabei fällt auf, das der linke Motor (fliege Quad+) nach einiger Zeit aufhört zu drehen.
Jedoch, das Verhalten lässt sich nicht wirklich akkurat reproduzieren.
Mal hört er bei rapiden Gasstößen auf, mal beim langsamen Roll steuern, mal wenn man einfach auf Mingas geht.
Irgendwer ne Ahnung woher das kommt und woran ich rumspielen müsste um das zu vermeiden?
Die anderen Motoren hatten dieses Verhalten nämlich bisher nicht einmal.
Grüße
Daniel
#4432 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 10.04.2011 18:43:38
von X-21
@yacco
Du hast recht man braucht sie nicht!
Aber wenn sie schon mal beim Kauf eines Arduino Boards dabei waren sollten sie auch funktionieren.!
Das originale FTDI von Sparfun funktioniert zwar prima aber einen Ersatz zu haben ist immer von Vorteil.
Redundanz ist auch für Dich ein Begriff.
Es funzt nu endlich.
Danke
Gruss
Uwe
#4433 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 10.04.2011 19:10:54
von speedy
X-21 hat geschrieben:Redundanz
Ok ... Redundanz .... voll wichtig jetzt gleich sofort ein zwei drei Stück an Ersatz zur Hand zu haben, wenn einer mal ausfällt.
Hast denn dann wenigstens auch paar Pro Minis als Ersatz ? Oder wäre das dann egal, wenn der mal ausfällt.
Wobei mit Redundanz ja eigentlich paralleler Betrieb oder so gemeint ist ... also schaltest die FTDI's parallel, um damit das Progamm dann mit Sicherheit hochgeladen zu bekommen ?

MFG
speedy
#4434 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 10.04.2011 19:39:37
von Sundog
soo, da ich mich den ganzen tag nicht gemeldet habe, hier kurz ein zwischenstand......
micha hat heute mit seinem argumicopter den maiden gemacht...
standard 1preter7 nur auf x-quad geändert und dann ein paar probs ausprobiert.
jetzt sind 8x4.5 drauf und der copter flog damit auf anhieb fast perfekt....
nur ein minimales aufschaufkeln...
bei mir scheint das adruino eine weg zu haben

das hat ftdi hat bei micha funktioniert, nur das adru wollte nicht, im schlimmsten fall
ist das board durch. werd mir dann mal eines bestellen.....
#4435 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 10.04.2011 19:45:44
von yacco
Uwe, verstehe, wunderte mich nur, dass alle verschieden sind. Wieviele Wiicopter baust du auf?
#4436 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 10.04.2011 20:44:47
von bert
Hallo,
habe über die Suchfunktion gesucht aber nichts gefunden, frage an euch; bei den Turnigy Regler sind die Ausgänge mit A B C markiert, beim Motor habe ich auch drei Kabel +,- und Signal? spielt es eine Rolle wo welches Kabel angeschlossen wird? wenn ja welches Kabel wohin?
Gruss
bert
#4437 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 10.04.2011 21:05:58
von frankyfly
Am Motor Ist das nicht + - ... sondern einfach die enden der Wicklungen. an an welche Motor-Ausgangskabel vom Regler du die verbindest ist egal, das schlimmste was passieren kann ist , das sich der Motor falschrum dreht, dann einfach 2 Beliebige vertauschen (oder den Regler umprogrammieren, wenn er es zulässt, dann spart man sich u.U. das Löten)
#4438 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 10.04.2011 21:56:24
von stiegl_1492
hallo Leute!
also hab heute mein ganzes Projekt nochmals zerlegt und auf eine Platine gebaut. Ich denke ich habe den Fehler gefunden! Hab den Empfänger abgeschlossen.. signale von WMP passen.. empfänger an.. nur müll...
dann gab ich geschaut.. GND weg.. ja klar alles passt weil der RX nicht drauf hängt.. dann hab ich alle GND auf der Platine zusammengefasst und alle VDC auf der Platine zusammengefasst.. und siehe da, es funktioniert. vorher war WMP auf PIN 12 - jetzt auf VDC und VDC kommt von 5V am Arduino und GND kommt auch von Arduino GND. Scheinbar macht das einen Unterschied!
ja werdet Ihr dann ja eh sehen wies aussieht...
bitte mal ansehen ob meine kalibration so passen kann!?
http://www.youtube.com/watch?v=Mx-NsxBVPl4
dann wollte ich noch fragen, wie kann ich dann den Stabil Mode, sprich NK, ein und aus schalten? ich hab das nicht ganz kapiert! hab auf meiner funke den kanal 5 für schalter "A" zugewiesen und im GUI Level auf "LOW" also wenn der Schalter auf "Ein" position ist sollte der NK ausschalten und bei "Aus", sprich Kanal5 ist LOW wieder eingeschalten sein!? aber wie erfährt das Arduino, dass der Kanal umgeschalten wurde?! da brauch ich wohl noch irgendwo einen Draht von CH5 aufs Arduino oder?!?!
weiters.. ich hab meinen Rahmen für den QuadX schon gebaut, Rahmen hat 762g, Elektronik ca.200g, Akku 200g + Regler,Motoren und Props
Also mein derzeitiges Gewicht summiert sich auf ca. 1200g
Welche Motoren, Regler und Props brauch ich damit das Ding dann auch vernünftig fliegt und man ev. auch noch eine Kamera draufschnallen kann!?
Danke für Eure Hilfe!
Grüße,
Chris
#4439 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 10.04.2011 22:30:54
von Theslayer
Theslayer hat geschrieben:Hey,
ich habe jetzt endlich wieder ein bisschen Zeit, um an meinem Wiicopter rumzubasteln und ich will die kommende Woche endlich mal Erstflug machen dürfen
Dabei hab ich aber derzeit ein Problemchen.
Im Arduino und im Gui ist alles fertig eingestellt.
Wenn ich nun die Motoren scharfstelle, fangen sie alle an zu drehen. Dann geb ich ein bisschen mehr Gas (Propeller hab ich abgenommen
) und teste halt mal die lenkbewegungen.
Dabei fällt auf, das der linke Motor (fliege Quad+) nach einiger Zeit aufhört zu drehen.
Jedoch, das Verhalten lässt sich nicht wirklich akkurat reproduzieren.
Mal hört er bei rapiden Gasstößen auf, mal beim langsamen Roll steuern, mal wenn man einfach auf Mingas geht.
Irgendwer ne Ahnung woher das kommt und woran ich rumspielen müsste um das zu vermeiden?
Die anderen Motoren hatten dieses Verhalten nämlich bisher nicht einmal.
Grüße
Daniel
Nachtrag, der Motor schaltet sich nach ca 14sekunden aus (hab ich grad nachgeprüft), dabei egal ob Gasstoß, Roll oder auch einfach nur so im Standgas laufen lassen.
Defekter Regler/Motor oder kanns auch was in den Einstellungen sein?
Grüße
Daniel
#4440 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 10.04.2011 22:38:58
von yacco
stiegl_1492 hat geschrieben:vorher war WMP auf PIN 12 - jetzt auf VDC und VDC kommt von 5V am Arduino und GND kommt auch von Arduino GND. Scheinbar macht das einen Unterschied!
Chris, keine gute Idee, der I2C wird deswegen über Pin 12 mit Spannung versorgt, damit die Software den Bus ab und an resetten kann - kommt scheinbar vor, dass die angeschlossenen Geräte plötzlich nichts mehr senden. Ausserdem sind die WMPs wohl eigentlich auf 3.3V ausgelegt.
Theslayer hat geschrieben:Defekter Regler/Motor oder kanns auch was in den Einstellungen sein?
Was für Regler sind das? Was passiert, wenn du die Regler mal umsteckst? Damit müßtest du eigentlich rausfinden, ob es am Regler liegt oder an der Ansteuerung.