Seite 433 von 1010
#6481 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 30.07.2011 11:10:22
von el-dentiste
dynai hat geschrieben:
@el-dentist: auch bei mir liegt jetzt ein noch nicht verbauter flyduino auf dem tisch und gps ist schon auf weg

ich werde mich also in absehbarer zeit auch mal mit der ardu-pirates software auseinander setzten.
gruß Chris
geil!

Welche sensorik willst du nehmen und welches GPS?
#6482 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 30.07.2011 11:48:39
von nobody284
guten morgen zusammen,
wooo könnte der fehler sein?
habe alle 4 regler über einen adapter gleich angelernt. das sind meine regler und motoren...
http://cgi.ebay.com/ws/eBayISAPI.dll?Vi ... 749wt_1185
nun stelle ich aber fest in der confi das ein regler immer zuspät gas animmt. also leerlauf drehzahl habe ich die 1120 genommen.. und wenn ich langsam gas gebe sind die anderen 3 motoren bei 1260-1280 bis dann der eine langsam auser knete kommt.
hat wer ne idee?
gruß stan
#6483 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 30.07.2011 12:01:17
von yacco
Moin Stan,
die Frage kam hier schon öfter. Im Stand ist das wohl durchaus normal, dass die Regler unterschiedlich angesteuert werden, weil es da noch nicht viel zu regeln gibt und kleinste Unterschiede in den Sensorwerten zu großen Abweichungen bei den Reglersignalen führen (vergleichbar mit einem Gyro im HH-Mode - wenn man den Heli bisschen um die Hochachse dreht, läuft das Servo auf Anschlag). Sobald der Copter abgehoben ist, sollte sich das geben.
#6484 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 30.07.2011 13:06:48
von nobody284
jaja kleine unterschiede sind ok.. aber wenn ich langsam gas gebe sind 3 regler bei 1260-1280 und dann erst kommt der vierte langsam mit 1130 das nen unterschied von 130-150 wenn ich den quad starten wollte schmiert der mir gleich in eine richtung!
so noch eine andere frage.. wo bekommt man die günstigsten props 1045er ? als anfänger habe ich schon nen größeren gebrauch davon

#6485 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 30.07.2011 13:10:30
von dynai
el-dentiste hat geschrieben:Welche sensorik willst du nehmen und welches GPS?
als sensorboard kommt die ffimu v 1.1 zum einsatz, welche aber inzwischen etwas bastelei hinter sich hat da der BMA auf dem original-board probleme gemacht hat, somit hab ich mir ein bma180 bob geätzt welches mit dem original bma astrein läuft.... ich schätzte mal das eine der leiterbahnen auf dem ffimu gebrochen war hat jedenfalls von anfang an ärger gemacht.
als gps werd ich den MT3329 (
http://store.diydrones.com/MediaTek_MT3 ... 329-02.htm) verwenden wobei ich hier grad etwas verunsichert bin da auf dem DIYDrones adapter 5V steht, der flyduino auf 5V serielle spg hat aber im DATASHEET die typical voltage mit 3.3Volt angegeben wird... muss ich da jetzt nen level-converter verbaun oder wie? fürs Sensor-Board werd ich einen verwenden (bin ein vorsichtiger mensch
Update: Kinderkram meint das DIYDrones hätte eine converter drauf und man kann es direkt an 5V betreiben, ansonsten würde es auf 3.3V Laufen
gruß Chris
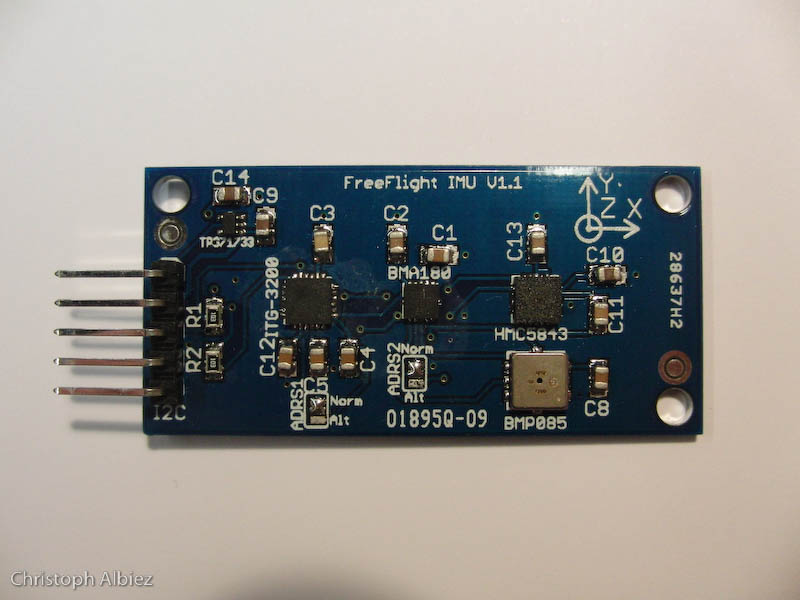
- CIMG3169.jpg (79.66 KiB) 1154 mal betrachtet
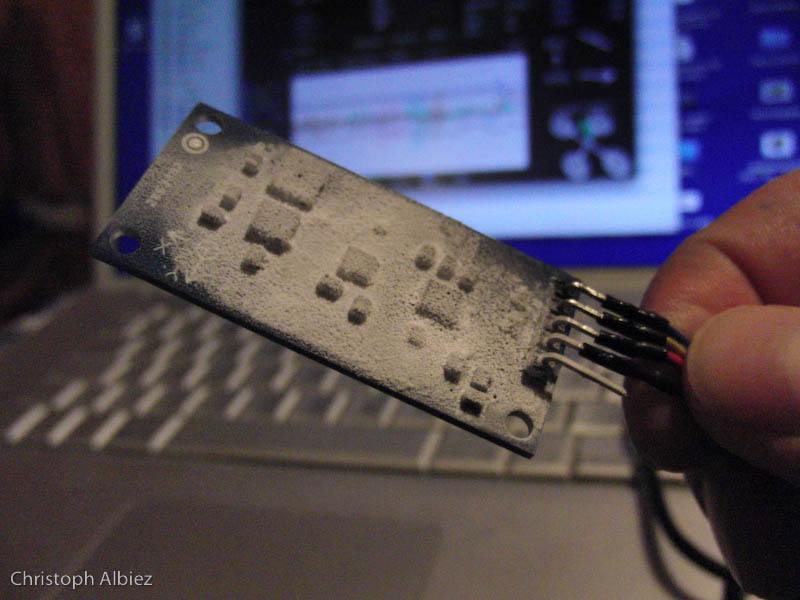
- kälte-test um den schuldigen zu finden
- CIMG3410.jpg (86.44 KiB) 1154 mal betrachtet

- neues zuhause für den Übeltäter
- CIMG3446.jpg (131.69 KiB) 1154 mal betrachtet
#6486 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 30.07.2011 13:34:09
von Mffa
r0sewhite hat geschrieben:Mffa hat geschrieben:Hi,
noch ne Frage:
Wo setze ich an, wenn mein Quad Flips vorwärts deutlich schneller dreht als rückwärts und links rum schneller als rechts rum ?
Gehen Deine Signale auf Nick und Roll auch sauber von 1000 bis 2000 in der GUI?
Danke für den Tipp. Da habe ich mich wohl verschaut (1998 statt 1898 gelesen) ... selbst, wenn ich die Wege auf voll stelle (bei meiner
DX6i max. 125%) fehlen mir jeweils 100 bei den Signalen.
Das Blöde ist auch, dass bei 1500 in der Mittelstellung (über Sub Trim eingestellt) ich nicht in beide Richtungen den gleichen Weg bekomme.
Kann ich das im Sketch irgendwo einstellen ? Ich dachte, dass ich bei der Funke alles auf "ungetrimmt" stelle und die Sketchwerte anpasse.Also besser gesagt, ich kanns ja sicher, aber wo ? Und inwieweit ziehen sich solche Werte dann durchs ganze Programm ?
Oder soll ich die Wirkung der "Ruder" über die RC-Rate erhöhen und die Sketch-Werte so lassen ?
#6487 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 30.07.2011 13:42:17
von dynai
hi,
mittelpunkt verstellen geht mit
Code: Alles auswählen
/* some radios have not a neutral point centered on 1500. can be changed here */
#define MIDRC 1500
die endanschläge solltest du so groß wie möglich hin bekommen biste da am ende kannste über den code eingreifen
Code: Alles auswählen
// ******************
// rc functions
// ******************
#define MINCHECK 1100
#define MAXCHECK 1900
gruß chris
#6488 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 30.07.2011 14:19:18
von Mffa
dynai hat geschrieben:hi,
mittelpunkt verstellen geht mit
Code: Alles auswählen
/* some radios have not a neutral point centered on 1500. can be changed here */
#define MIDRC 1500
die endanschläge solltest du so groß wie möglich hin bekommen biste da am ende kannste über den code eingreifen
Code: Alles auswählen
// ******************
// rc functions
// ******************
#define MINCHECK 1100
#define MAXCHECK 1900
gruß chris
Schon mal Danke,
bei mir schauts jetzt so aus bei allen Trimmern auf 0 und maximalem Ausschlag an der Funke:
Throttle: 990 / ... / 2038
Pitch: 1102 / 1515 / 2009
Roll: 1022 / 1513 / 1913
Yaw: 1020 / 1515 / 2009
Also nicht überall gleich "schlecht" und nicht gleich unsymmetrisch.
Bei 100% Servoweg:
Throttle:
1096 / ... / 2038
Pitch: 1102 / 1515 /
1910
Roll:
1112 / 1513 / 1913
Yaw: 1020 / 1515 /
1909
Hat wohl was damit zu tun, dass ich Pitch und Roll an der Funke invertieren musste. Kann man die Wirkrichtung im Sketch invertieren ? Bei Yaw gehts ja auf jeden Fall ... gar nicht mal so einfach ...
#6489 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 30.07.2011 14:27:01
von Mffa
Jetzt mal mit Heli-Programm 1Servo -90°(bei 100% Servoweg):
Throttle: 1096 / ... / 1934
Pitch: 1106 / 1513 / 1912
Roll: 1119 / 1515 / 1913
Yaw: 1107 / 1515 / 1908
Damit lässt sich doch was anfangen ...
#6490 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 30.07.2011 14:30:51
von Mffa
... bei 125% verschiebt es sich auch immer nur in eine Richtung Throttle und Pitch "oben raus 100 mehr. Roll und Yaw untern rum 100 weniger ... auch blöd.
#6491 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 30.07.2011 14:37:33
von dynai
hi,
also bei meiner ff7 (futaba) muss ich die % der wege für beide richtungen einstellen das wird nicht automatisch symetrisch gemacht (zum glück auch).
gruß Chris
#6492 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 30.07.2011 16:18:36
von Sonne
Hi zusammen,
mein Arduino leuchtet ständig in schneller Abfolge Grün, Software kann ich problemlos raufspielen, und im GUI ist auch nichts zu erkennen, kann also auch nichts einstellen..??
Weiß jemand weiter?
Danke und Gruß
Jörg
#6493 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 30.07.2011 18:38:57
von dynai
hi jörg,
1.) welche komponenten verwendest du
2.) kannst du uns fotos von der verkabelung hoch stellen
3.) zeigt die GUI irgendetwas oder was ist mit "nichts zu erkennen" gemeint?
4.) was hast du an der original multiwii-software geändert (auskommentiert,....)
gruß Chris
#6494 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 30.07.2011 20:32:22
von Sonne
Sorry, stimmt:
1.) welche komponenten verwendest du
V3 Platine von Multiwiicopter (Alex)
2.) kannst du uns fotos von der verkabelung hoch stellen
Muss ich mal welche machen
3.) zeigt die GUI irgendetwas oder was ist mit "nichts zu erkennen" gemeint?
Nichts zu erkennen, kein Quadro in der Ansicht
4.) was hast du an der original multiwii-software geändert (auskommentiert,....)
Nichts geändert. Hab nur Arduino mit original WiMo+
#6495 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 30.07.2011 20:53:43
von dynai
ok,
Code: Alles auswählen
/*******************************/
/****CONFIGURABLE PARAMETERS****/
/*******************************/
/* Set the minimum throttle command sent to the ESC (Electronic Speed Controller)
This is the minimum value that allow motors to run at a idle speed */
//#define MINTHROTTLE 1300 // for Turnigy Plush ESCs 10A
//#define MINTHROTTLE 1120 // for Super Simple ESCs 10A
#define MINTHROTTLE 1200 // roxxy_quax
/* The type of multicopter */
//#define GIMBAL
//#define BI
//#define TRI
//#define QUADP
#define QUADX
//#define Y4
//#define Y6
//#define HEX6
//#define HEX6X
//#define FLYING_WING //experimental
hier muss der typ des copter auskommentiert sein sonst gehts schonmal nicht
nachdem du die multiwiiconf gestarted und den com-port ausgewählt hast nicht vergessen START zu drücken sonst beginnt die Kommunikation nicht
gruß Chris