Seite 434 von 1010
#6496 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 30.07.2011 20:57:10
von stang6t8coupe
Hifly hat geschrieben:Ist der BMA wirklich in der richtigen Richtung und nicht vielleicht in einer oder beiden Achsen falsch herum? In der GUI geprüft? Wenn der Copter gerade steht, sollten die ACC-Werte nun 0 , 0, 200-240 sein. Wenn Du den Copter nun in einer Richtung (Roll oder Nick) kippst, sollte das entspechende Symbol in der GUI genau so stehen und stehen bleiben. Ist die Richung nicht passend im Sketch eingestellt, dann bewegt sich das Symbol wieder auf die Ausgangslage bzw. darüber hinaus (habe das gerad mal ausprobiert, dass es so ist).
So, Kinder schlafen, Zeit zum Basteln

Ich hab mir alles im Koptertool angeschaut, ACC ist im Stillstand auf 0/0/243, das sollte eigentlcih ja passen. Wenn ich den Kopter um die Achsen drehe bewegen sich dei Symbole für Pitch und ROll genau wie die Bewegung des Kopters. Da würd ich jetzt eher ausschließen dass der falsch herum eingebaut ist. Testweise hab ich P nochmal auf 2,5 reduziert, das hat auch nix gebracht. Was könnte das sonst noch sein?
Grüße
Adrian
#6497 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 30.07.2011 21:24:45
von Sonne
Hi Chris,
das hab ich bereits alles durch, aber bislang hats keine Änderungen gebracht. Der WiMo+ wird nicht erkannt im GUI, da muss ich jetzt mal nach Lötbrücken suchen gehen, denke ich...
Trotzdem Danke für Deine Mühe!!!
dynai hat geschrieben:ok,
Code: Alles auswählen
/*******************************/
/****CONFIGURABLE PARAMETERS****/
/*******************************/
/* Set the minimum throttle command sent to the ESC (Electronic Speed Controller)
This is the minimum value that allow motors to run at a idle speed */
//#define MINTHROTTLE 1300 // for Turnigy Plush ESCs 10A
//#define MINTHROTTLE 1120 // for Super Simple ESCs 10A
#define MINTHROTTLE 1200 // roxxy_quax
/* The type of multicopter */
//#define GIMBAL
//#define BI
//#define TRI
//#define QUADP
#define QUADX
//#define Y4
//#define Y6
//#define HEX6
//#define HEX6X
//#define FLYING_WING //experimental
hier muss der typ des copter auskommentiert sein sonst gehts schonmal nicht
nachdem du die multiwiiconf gestarted und den com-port ausgewählt hast nicht vergessen START zu drücken sonst beginnt die Kommunikation nicht

gruß Chris
#6498 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 30.07.2011 21:38:06
von Mffa
dynai hat geschrieben:hi,
also bei meiner ff7 (futaba) muss ich die % der wege für beide richtungen einstellen das wird nicht automatisch symetrisch gemacht (zum glück auch).
gruß Chris
Nö, das ist bei meiner Spektrum DX6i nicht so, da wird scheinbar nur der Maximalwert vergrößert, die untere Grenze bleibt gleich. Und durch das invertieren von Roll und Yaw verschiebt sich da dann die untere Grenze. Doch ein Billigfunke. Allerdings ist mir das bei der Flächenfliegerei noch nicht aufgefallen. Hmmm ... ich wollte mir ja sowieso eine DX8 holen ... *NICHT DRAN DENKEN*

Die Frau bügelt, die Kinder sind im Bett, dann werde ich doch jetzt mal weiter rumbasteln. Wei0 zufällig jemand, wie man Yaw und Roll in der Software invertiert ?
#6499 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 30.07.2011 21:49:26
von dynai
Sonne hat geschrieben:Hi Chris,das hab ich bereits alles durch, aber bislang hats keine Änderungen gebracht. Der WiMo+ wird nicht erkannt im GUI, da muss ich jetzt mal nach Lötbrücken suchen gehen, denke ich...
hm... mmm foto von deiner verdrahtung? weil wie du schon selbst vermuted hast kann das blinken auch auf ein problem auf dem i2c bus hinweisen.
gruß Chris
#6500 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 31.07.2011 08:58:26
von el-dentiste
dynai hat geschrieben:el-dentiste hat geschrieben:Welche sensorik willst du nehmen und welches GPS?
als sensorboard kommt die ffimu v 1.1 zum einsatz, welche aber inzwischen etwas bastelei hinter sich hat da der BMA auf dem original-board probleme gemacht hat, somit hab ich mir ein bma180 bob geätzt welches mit dem original bma astrein läuft.... ich schätzte mal das eine der leiterbahnen auf dem ffimu gebrochen war hat jedenfalls von anfang an ärger gemacht.
als gps werd ich den MT3329 (
http://store.diydrones.com/MediaTek_MT3 ... 329-02.htm) verwenden wobei ich hier grad etwas verunsichert bin da auf dem DIYDrones adapter 5V steht, der flyduino auf 5V serielle spg hat aber im DATASHEET die typical voltage mit 3.3Volt angegeben wird... muss ich da jetzt nen level-converter verbaun oder wie? fürs Sensor-Board werd ich einen verwenden (bin ein vorsichtiger mensch
Update: Kinderkram meint das DIYDrones hätte eine converter drauf und man kann es direkt an 5V betreiben, ansonsten würde es auf 3.3V Laufen
gruß Chris
Moin Chris
Ok danke!!
Ich weiß noch gar nicht was, bin im Bereich Diydrones noch Noob

ich les mich so gut ich kann ein und werde erstmal Wii Software nehmen um zu gucken ob die Mechanik an sich fliegt.
Zum Sensor Board und deinen 3V Gedanken frag doch Paul am besten, aber Vorsicht ist in dem Fall sicherlich der richtige weg, bevor es raucht und nach Ampere richt.
#6501 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 31.07.2011 09:53:07
von Hifly
stang6t8coupe hat geschrieben:Testweise hab ich P nochmal auf 2,5 reduziert, das hat auch nix gebracht. Was könnte das sonst noch sein?
Hi Adrian,
da das Zappeln nur im aktivierten Levelmode ist, versuch es mal mir niedrigeren P für Level.
#6502 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 31.07.2011 10:39:06
von stang6t8coupe
Hi,
Ich bin jetzt auf 4 runter mit dem P bei Level, beim fliegen schaukelt er sich nicht mehr auf. Wenn ich den Kopter halte und stark wackle schaukelt er sich auf. Soll ich lieber weiter runter oder ist das ok so?
Grüsse
Adrian
#6503 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 31.07.2011 10:46:37
von el-dentiste
Moin Adrian
Evtl ist dein Rahmen ein bissl zu labil und schwingst sich deshalb auf.
Halte doch mal zwei gegenüberliegende Mots fest und verdreh die. Es sollte schon recht stabil sein!
Evtl schraubst du auch mal alles auf ein alukreuz . Um zu testen ob's am Rahmen oder dich den Einstellungen liegt.
#6504 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 31.07.2011 11:12:27
von Aeleks
Ich habe genau das gleiche Problem.
Software aufspielen geht fehlerlos.
Dann MultiWiiConfig gestartet, COM3 ausgewählt und Start gedrück.
Auf dem Arduino blinkt die grüne LED sehr schnell. Die Cycletime wird mit ca. 3370 angezeigt (etwas hoch? Bei meinem anderen Board waren es um 3220) und fluktuiert auch, aber beim Bewegen werden keine Ausschläge angezeigt. Es ist nur eine durchgehende Linie zu sehen, beige wie ACC_Z, die aber keine Ausschläge anzeigt.
PID Werte lassen sich auslesen und schreiben.
Hier ein Foto von der Verkabelung:

dynai hat geschrieben:Sonne hat geschrieben:Hi Chris,das hab ich bereits alles durch, aber bislang hats keine Änderungen gebracht. Der WiMo+ wird nicht erkannt im GUI, da muss ich jetzt mal nach Lötbrücken suchen gehen, denke ich...
hm... mmm foto von deiner verdrahtung? weil wie du schon selbst vermuted hast kann das blinken auch auf ein problem auf dem i2c bus hinweisen.
gruß Chris
#6505 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 31.07.2011 11:17:44
von Aeleks
Ich habs schon gefunden.
Ich hab zwei Pins vergessen, SCA und SCL für das WMP.. Verdammt.
*Edit* Kurzes Kupferkabel dazwischen gelötet und es funktioniert!
Aeleks hat geschrieben:Ich habe genau das gleiche Problem.
Software aufspielen geht fehlerlos.
...
dynai hat geschrieben:Sonne hat geschrieben:Hi Chris,das hab ich bereits alles durch, aber bislang hats keine Änderungen gebracht. Der WiMo+ wird nicht erkannt im GUI, da muss ich jetzt mal nach Lötbrücken suchen gehen, denke ich...
hm... mmm foto von deiner verdrahtung? weil wie du schon selbst vermuted hast kann das blinken auch auf ein problem auf dem i2c bus hinweisen.
gruß Chris
#6506 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 31.07.2011 11:42:05
von dynai
Hi
warst schneller als ich das bild machen könnte....

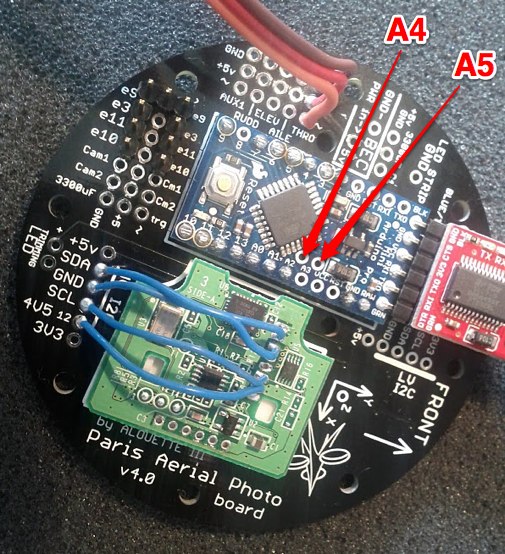
- A4A5.jpg (120.89 KiB) 1024 mal betrachtet
(lass uns wissen wies weiter geht) mensch du bist mir zu munter für sonntag morgen da komm ich ja noch gar nicht mit schreiben/korrigieren mit

gruß Chris
#6507 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 31.07.2011 11:54:52
von Aeleks
Danke für die schnelle Antwort!
Ja, ich bin schon seit sieben munter und am basteln. Die die Kinder sind bei den Großeltern, das muss man doch ausnutzen.
#6508 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 31.07.2011 16:57:31
von caesar
Hallo kennt jemand eine Möglichkeit aus dem Arduino den Sketch auszulesen um ihn zu bearbeiten. Ich habe Ihn selber nicht, ein Forum Mitglied hat mir diesen aufgespielt. Da ich jetzt mein BMA020 wieder eingebaut habe muss ich noch mal in den Sketch.
FG Torsten
#6509 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 31.07.2011 17:04:55
von dynai
mmm Auslesen wird wohl nix
aber das ist schnell aufgespielt.
sketch von
http://multiwii.googlecode.com/svn/tags ... iiV1_7.zip downloaden
Code: Alles auswählen
/* Set the minimum throttle command sent to the ESC (Electronic Speed Controller)
This is the minimum value that allow motors to run at a idle speed */
//#define MINTHROTTLE 1300 // for Turnigy Plush ESCs 10A
//#define MINTHROTTLE 1120 // for Super Simple ESCs 10A
#define MINTHROTTLE 1190
/* The type of multicopter */
//#define GIMBAL
//#define BI
//#define TRI
//#define QUADP
#define QUADX
//#define Y4
//#define Y6
//#define HEX6
//#define HEX6X
//#define FLYING_WING //experimental
Code: Alles auswählen
/* I2C accelerometer */
//#define ADXL345
#define BMA020
//#define BMA180
//#define NUNCHACK // if you want to use the nunckuk as a standalone I2C ACC without WMP
entsprechend den eigenen bedürfnissen anpassen, aufspielen und gut
gruß Chris
#6510 Re: Der WII-Copter ( Selbstbau-Projekt )
Verfasst: 31.07.2011 17:21:01
von caesar
Ist das normal das die PID werte nach dem Sketch einspielen noch so sind wie vor dem einspielen??? Hatte schon andere Werte als die , die Standard sind FG Torsten