Seite 1 von 2
#1 Nächstes AutoQuad Problem, armed aber Motoren starten nicht
Verfasst: 01.05.2013 15:43:37
von DUKE40
Hi,
nun bin ich fast soweit, wollte nun die Wirkrichtungen sowei Steuerrichtungen überprüfen, bevor es zu den ersten Flug geht, aber der AutoQuad armed (Grün LED dauer an), aber die Motoren drehen nicht.
Regler sind Flyduino 20A mit SimonK. Motoren sind T-Motor MT2216/11 900KV. Regler wurden eingelernt.
Habe schon an den Wert MOT_START gedreht, leider bis jetzt ohne jeglichen Erfolg. Habe es etwas hochgesetzt, dann niedriger, aber die Motoren bleiben tot. Habe auch noch geprüft, dass die Anschlüsse mit meiner Mixing Tabelle übereinstimmen (vorne rechts ist 8, vorne links 6, hinten links 7 und hinten rechts 5):
PWM Channel Throttel Pitch Roll YAW
1 0 0 0 0
2 0 0 0 0
3 0 0 0 0
4 0 0 0 0
5 100 -100 100 100
6 100 100 -100 100
7 100 -100 -100 -100
8 100 -100 100 -100
9 0 0 0 0
10 0 0 0 0
11 0 0 0 0
12 0 0 0 0
13 0 0 0 0
14 0 0 0 0
Hat einer von euch eine ähnliche Konfiguration und kann mit sagen was er für MOT_START eingetragen hat? Oder wie ich die Sache sonst lösen kann?
Danke,
#2 Re: Nächstes AutoQuad Problem, armed aber Motoren starten ni
Verfasst: 01.05.2013 19:37:57
von el-dentiste
hi
haste auch den signal Leitung an richtigen Kontakt gesteckt??
in GCS steht armed(achso led geht ja dauerhaft an)
#3 Re: Nächstes AutoQuad Problem, armed aber Motoren starten ni
Verfasst: 01.05.2013 19:44:22
von DUKE40
Hi Nico,
wie meinst Du das mit signal Leitung am richtigen Kontakt? Habe meine ESCs an M5, M6, M7 und M8 angeschlossen und die Signalleitung auf den Pin welcher mti den weissen Dreieck auf den Board gekennzeichnet ist.
Sollte doch OK sein oder? Du hast ja auch Flyduino SimonK ESCs in Deinen. Was hast Du für MOT_START Werte eingestellt?
Ich bin echt am rätseln was es sein kann. Und heute war optimaler Wetter um den Jungfernflug zu machen, aber es wird heute nichts, hoffentlich klappt es bis zum Wochenende.
#4 Re: Nächstes AutoQuad Problem, armed aber Motoren starten ni
Verfasst: 01.05.2013 19:51:51
von el-dentiste
hi Jean
ja genau, wo das dreieck ist , kommt signal hin

lade dir mal die neuste GCS. Da sind fertige mixing tabellen und anschluss bildchen.
ich habe den standard wert gelassen
reagiert alles korrekt bei den radio balken?
#5 Re: Nächstes AutoQuad Problem, armed aber Motoren starten ni
Verfasst: 01.05.2013 20:03:30
von DUKE40
Ja, bei den Radiobalken ist alles sowie es gemäß Anleitung sein soll. Bei Gas von 0 bis 1400 und bei allen anderen von -700 bis +700.
Ich habe den Standard bei der mixing Tabelle genommen, nur die Ports geändert von 1 bis 4 auf 5 bis 8, weil es zu meiner Konfiguration besser passte was die Verkabelung angeht.
#6 Re: Nächstes AutoQuad Problem, armed aber Motoren starten ni
Verfasst: 01.05.2013 20:37:33
von DUKE40
Lag doch an verdrehte Servokabeln, Signal mit Masse vertauscht. Nun starten die Motore aber mit viel zu viel Schub, selbst bei niedrigsten Gasstellung geht der Copter schon ab, als wolle er zum Mond fliegen.
Scheint mir irgendwie verhext.
#7 Re: Nächstes AutoQuad Problem, armed aber Motoren starten ni
Verfasst: 01.05.2013 20:52:33
von r0sewhite
Dein Mischer sieht merkwürdig aus. Was ist das für ein Coptertyp?
#8 Re: Nächstes AutoQuad Problem, armed aber Motoren starten ni
Verfasst: 01.05.2013 21:04:31
von DUKE40
Jetzt bekomme ich nicht mal mehr eine Verbindung von QGroundControl zum AQ. Der Port wird zwar gefunden, ein Connect liefert keine Fehlermeldung, aber die Verbindung scheint nicht zu klappen, im QGroundcontrol steht immer, "Not Connected". Auch einen Disarmen funktioniert nicht. Ist der Kopter scharfgestellt bleibt es auch so bis der Akku abgeklemmt wird. Irgendwie ist der Wurm drin. Warscheinlich ist es viel zu kompliziert für einen Ingenieur. Habe keine Ahnung wo ich ansetzen sollte.
@rosewithe
es ist einen Quad X.
#9 Re: Nächstes AutoQuad Problem, armed aber Motoren starten ni
Verfasst: 01.05.2013 21:21:24
von el-dentiste
welchen ftdi hast du und wie angeschlossen?
du brauchst nur TX/RX/GND mehr nicht !
hast du aktuellste gcs ?
(sorry hier ist alles zeitverzögert:( hab heute nen 2.2kw hexa mit BLG eingetanzt und die Krücke rechnet sich hier zu tode)
#10 Re: Nächstes AutoQuad Problem, armed aber Motoren starten ni
Verfasst: 01.05.2013 21:24:59
von r0sewhite
Dann müsste M7, Spalte 2 +100 und nicht -100 sein. Vielleicht aber nur ein Tippfehler von Dir?
Ich würd beim QuadX aber lieber einen konventionellen Mischer nehmen, der auf Nick und Roll mit +/-50 arbeitet. 100% könnten ein wenig zu radikal sein. Die meisten Mischer, egal ob DJI, Multiwii, Baseflight oder sonstige, beruhen auf der Brechnungsgrundlage des maximalen Abstands vom Zentrum. Das heißt, die tatsächlich maximale Entfernung und die Entfernung in Bezug auf die zu steuernde Achse werden in ein prozentuales Verhältnis gesetzt.
Am einfachsten ist das an einem Flat Octo + zu beschreiben, da dieser ähnlich ist wie ein Quad + und ein Quad X: Linker und rechter Motor kriegen auf Roll +/-100%. Die X-Motoren jedoch nur 50%, da sie nur halb so weit von der Roll-Achse entfernt sind, wie die äußeren Motoren. Auf Nick wiederum kriegen der vordere und hintere Motor +/-100% und die X-Motoren wieder nur 50%.
Da die Motoren beim Quad X auf die jeweilige Flugachse (Nick oder Roll) gemessen nur die halbe Spannweite entfernt sind, sollten auch nur 50% eingetragen werden.
#11 Re: Nächstes AutoQuad Problem, armed aber Motoren starten ni
Verfasst: 01.05.2013 21:33:57
von el-dentiste
gibt doch jetzt so ne schöne Übersicht in der neuen GCS
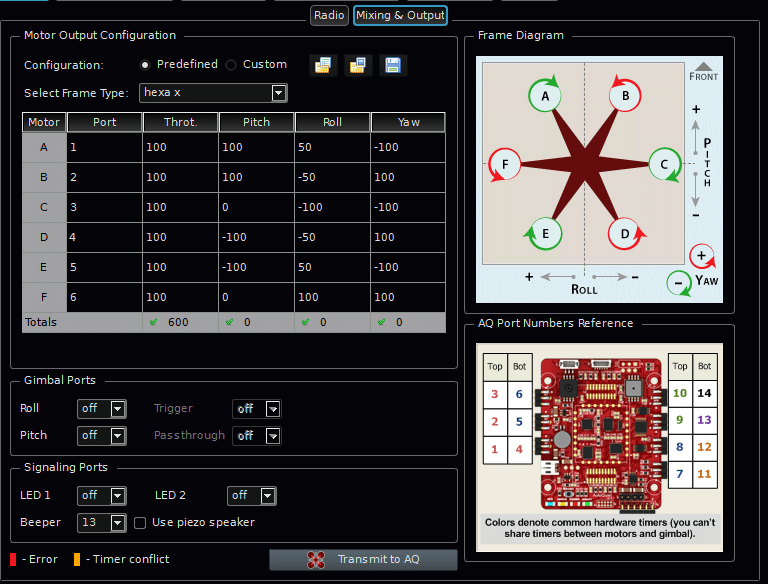
- new-ports-config.png (46.92 KiB) 910 mal betrachtet
#12 Re: Nächstes AutoQuad Problem, armed aber Motoren starten ni
Verfasst: 01.05.2013 21:46:56
von DUKE40
@Tilman,
habe die Standard mixing Tabelle vom Qgroundcontrol verwendet, dort steht +/-100.
Nee Tippfehler bei M8:
sollte so sein:
M5 100 -100 100 100
M6 100 100 -100 100
M7 100 -100 -100 -100
M8 100 100 100 -100
Es ist übrigens kein komplett symetrischer Quad X, die vorderen Armen sind etwas weiter offen als die Hinteren, ist ja für FPV angedacht.
@Nico,
ich verwende den FTDI von Paul, den schwarzen und es hat bis heute Nachmittag gut funktioniert, ich habe ja noch meine Parametern auf den AQ übertragen können.
Da sind RX, TX, 3.3V, CTS und GND angeschlossen. Auch die Einstellungen im QGroundcontrol sind die gleichen geblieben und es hat vor ein Paar Stunden noch funktioniert.
Ich habe es mit der GCS 1.2.1 unter Windows und die ältere 1.1.2 unter Linux probiert, aber beide können anscheinend die Verbindung nicht aufbauen. Scheint also nicht an GCS zu liegen.
Ich glaube ich lasse es für heute und lege mich hin. Vielleicht braucht der auch nur etwas Ruhe.
#13 Re: Nächstes AutoQuad Problem, armed aber Motoren starten ni
Verfasst: 02.05.2013 01:18:23
von r0sewhite
Die 3V3 sind egal, da der AQ ohne gesetztem Versorgungsjumper sowieso mit eigener Spannung läuft. Aber klemm mal CTS ab. Das funktioniert in der Regel nicht.
Was den Mixer betrifft: Hmm,... ich hab da meine leisen Vorbehalte gegen die 100%, doch da ja wirklich niemand korrekt belegen kann, was aus welchem Grund richtig oder falsch ist, wirst Du damit zumindest nicht schlecht fliegen. Letztendlich werden die Mischungsverhältnisse auf Pitch und Roll eh wieder durch den PID-Controller und die eigenen Raten beeinflusst.
#14 Re: Nächstes AutoQuad Problem, armed aber Motoren starten ni
Verfasst: 02.05.2013 22:25:45
von DUKE40
Also, nach einer Nacht Ruhe, ging die Verbindung wieder. Aber die Motore habe ich trotzdem immer noch nicht zum Laufen bringen können. Nun ist mein Laptop schon zum zweiten Mal abgeschmiert als ich die Verbindung zum AQ erstellen wollte. Windows halt.
Und unter Linux habe ich die neueste Version von GCS noch nicht zum Laufen gebracht, ich scheine ziemlich der einzige zu sein, der es unter Linux verwendet oder verwenden will.
Gehe jetzt in den Federn, morgen muss ich wieder früh raus.
#15 Re: Nächstes AutoQuad Problem, armed aber Motoren starten ni
Verfasst: 04.05.2013 14:31:39
von DUKE40
der AutoQuad bleibt jetzt am Boden bis das Problem gelöst ist.
Ich verwende schon die neueste GCS 1.2.1, und ich habe einige Tests gemacht um sicherzustellen woran es liegt, und das Ergebnis ist es liegt definitiv am AutoQuad, aber was ist da falsch oder wo muss ich ansetzen ist mir noch ein Rätsel.
Ich hatte meine Motoren wie folgt definiert:
A->8 /\ B->6
|
D->7 C->5
Und immer der Esc der an M7 hing hat den Problem gemacht, egal welcher es war, also lag definitiv nicht am ESC oder am Motor.
Dachte ich verwende einen anderen Port, vielleicht hat der was abbekommen, habe also D auf M4 gelegt, das Problem blieb.
Nun habe ich folgende Konfiguration
A->10 B->3
D->1 C->11
Trotzdem startet der Motor bei D erst viel später und bei starken Roll nach Links (Drehzahl auf A und D wird gesenkt) stoppt der Motor und braucht zu viele Zeit um wieder zu starten wenn der Knüppel wieder in Mittelstellung ist. Dies würde im Flug unweigerlich zu eine Absturz führen, was ich definitiv nicht hinnehmen will.
Ich hoffe es findet sich jemand der mir hier weiterhelfen kann.