Hi Mirko,
Husi hat geschrieben:Du fliegst mit dem AutoCAD M4 Controler und schickst dessen Sensordaten über dein MAV2Telem Board an einen Arduino, der deinem Sat das TM1000 vorgaukelt, oder? Oder ist das TM1000 auch noch verbaut?
also, der Arduino (das ist übrigens ein Pro Micro, Atmega32U4) gaukelt einem TM1000 die diversen Sensoren vor (z.B. GPS, Höhe, ...). Er ist an dessen X-BUS (so heißt der Spektrum Sensor-Bus) angeschlossen. Der X-Bus ist ein simpler I2C-Bus; die Sensoren sind Slave, der TM1000 ist (der einzig erlaubte) Master.

- TM1000 - wird für die Spektrum Telemetrie IMMER benötigt. Dieses Quad fliegt mit einer AQ6 - alle Infos dazu sind hier: http://forum.autoquad.org/viewtopic.php?f=38&t=2920
- SANY0099.jpg (1.55 MiB) 4959 mal betrachtet
Bei Spektrum funken nicht die Empfänger oder die Sats die Telemetriedaten zur Fernsteuerung, sondern der TM1000 sendet diese.
Husi hat geschrieben:- Heißt der Sensorbus vom AutoCAD = Mavlink?
Nein, Mavlink ist ein Protokoll (
http://en.wikipedia.org/wiki/MAVLink) mit dem alle möglichen Daten übertragen werden können. Im Falle der Autoquad Telemetrie werden die Sensordaten der Flightcontroller mittels MavLink (=Protokoll) über eine serielle Schnittstelle (UART, 115kbaud) an den Arduino übertragen. Der 'interpretiert' diese und erzeugt die notwendigen Sensortasten für den TM1000
Husi hat geschrieben:- Wieso steht im Senderdisplay als Überschrift über den Sensordaten "JetCat"? Du fliegst doch einen Quad-Copter und keinen Jet, kann man das nicht editieren?
Der JetCat ist ein Sensor der - wie du richtig vermutest - zur Anzeige von Turbinendaten genutzt wird. Da man aber hier nicht nur Daten, sondern auch zwei Textfelder hat habe ich mir ein schönes 'Statusdisplay' gebaut. Wie gesagt: was angezeigt wird liegt in deiner Macht; die Überschriften und Feldnamen (z.B. AGT = Abgastemperatur) kann man nicht editieren da die fest in der Firmware des Senders sind. Was angezeigt werden soll (Werte, nicht Nachrichten) weißt du aber --> AGT in meinem Fall ist die vertikale Genauigkeit des GPS in cm (wenn also dort z.B. 103 angezeigt wird ist die Pos-Genauigkeit somit 1,03m).
Hier mal - als Beispiel - die Datenstruktur des JetCat Sensors
Code: Alles auswählen
/* * * * * * * * * * * * *
* Jetcat Message structure *
* * * * * * * * * * * * */
struct { /* USE BCD Conversion !! */
uint8_t sensorID; /* 0 0x15 */
uint8_t sensorSpace; /* 1 0x0 */
uint8_t JCstatus; /* 2 statustext: 0x00:OFF
0x01: WAIT FOR RPM
0x02: IGNITE
0x03;ACCELERATE
0x04:STABILIZE
0x05: LEARN HIGH
0x06: LEARN LOW
0x07: -- UNDEFINED --
0x08: LOW DOWN
0x09:MANUAL
0x0A: AUTO-OFF
0x0B: RUN
0x0C: ACCELERATION DELAY
0x0D: SPEED REG
0x0E: TWO-SHAFT-REGULATE
0x0F: PRE Heat 1
0x10: PRE HEAT 2
0x11: MAIN F START
0x12: -- NOT USED __
0x13: KERO FULL ON
0x14: MAX STATE */
uint8_t JCthrottle; /* 3 */
uint8_t PackVoltLo; /* 4 */
uint8_t PackVoltHi; /* 5 */
uint8_t PumpVoltHi; /* 6 */
uint8_t PumpVoltLo; /* 7 */
uint8_t RPMLo; /* 8 */
uint8_t RPMMid; /* 9 */
uint8_t RPMHi; /* 10 */
uint8_t JC_NA; /* 11 0x0 */
uint8_t TempEGTLo; /* 12 */
uint8_t TempEGTHi; /* 13 */
uint8_t OffCondition; /* 14 statustext: 0x00: -- N/A--
0x01: SWITCHED OFF VIA TRANSMITTER
0x02: OVERTEMPERATURE
0x03: IGNITION TIMEOUT
0x04: ACCELERATION TIMEOUT
0x05: ACCELERATION TO SLOW
0x06: OVERSPEED
0x07: LOW RPM SHUTOFF
0x08: LOW BATTERY
0x09: AUTO OFF
0x0A: LOW TEMPERATURE SHUTOFF
0x0B: HIGH TEMPERATURE SHUTOFF
0x0C: GLOWPLUG FAULT
0x0D: WATCHDOG TIMER
0x0E: FAILSAFE OFF
0x0F: MANUAL OFF
0x10: BATTERY VOLTAGE FAULT
0x11: TEMP SENSOR FAULT
0x12: FUEL FAULT
0x13: PROP FAULT
0x14: TURBINE 2 FAULT
0x15: TURBINE 2 DIFFERNECE TO HIGH
0x16: TURBINE 2 NO COMMUNICATION
0x17: MAX OFF CONDITION */
uint8_t JC_END; /* 15 0x0 */
} SpektrumJetcat;
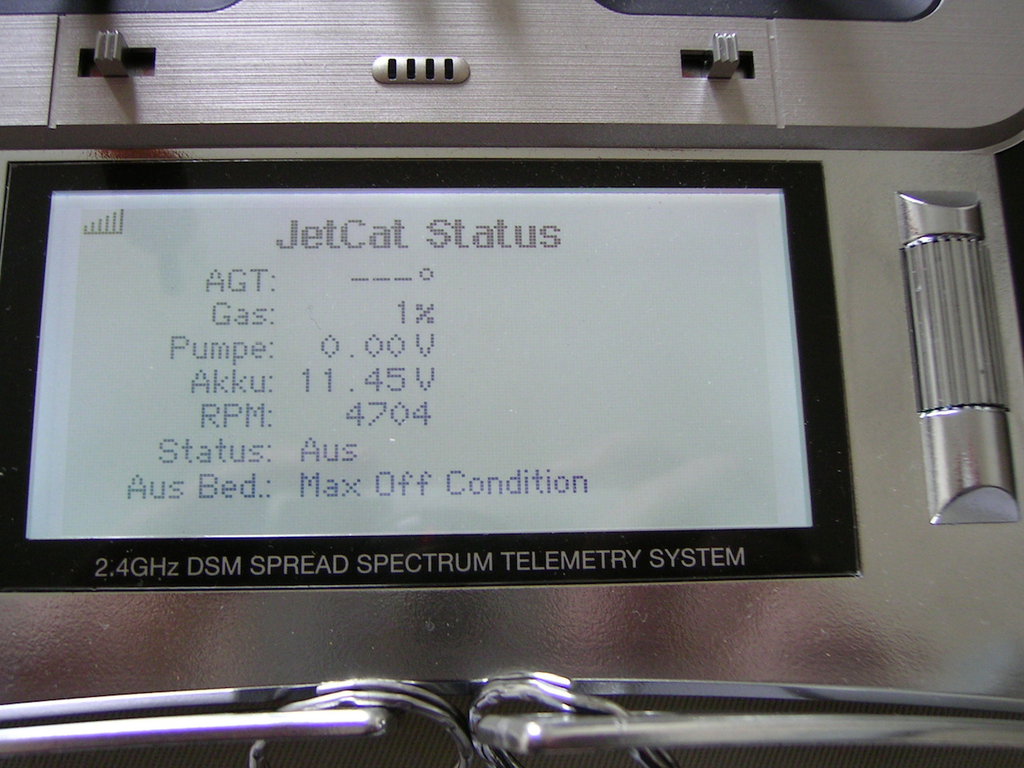
- JetCat Status - wird zur Anzeige mehrerer Sensordatenverwendet
- SANY0157.jpg (139.21 KiB) 4957 mal betrachtet
Bezogen auf das obige Bild heißt das bei mir:
AGT = vertikale GPS Genauigkeit
Gas = Stellung des Throttle Knüppels in %
Pumpe = Spannung des zweiten Flugakku --> nicht angeschlossen, deshalb 0V
Akku = primärer Flugakku (3S zum Test)
RPM = Höhe in cm
Status = Flugzustand (disarmed)
Aus Bed = zusätzliche Info zum Flugzustand bzw. Fehlerinfo. 'Max Off Condition' bedeutet 'kein GPS fix' - wechselt auf 'N/A' wenn ein 3D-fix vorhanden ist. Wie bereits gesagt: man muss mit dem Leben was angezeigt werden kann und sich dann sinnvolle Messages basteln. Hat man aber schnell drauf!
Husi hat geschrieben:- Was bitte ist ein "CAN"?
Wenn du ein Auto hast (Oldtimer lassen wir mal außen vor

) fährst du mit diesem Bussystem durch die Gegend. CAN = Controller Area Network (
http://de.wikipedia.org/wiki/Controller_Area_Network). Das nutze ich - anstelle von PWM - um mit den ESC32 zu 'kommunizieren'. Störsicher und schneller als PWM; da es ein Bussystem mit Protokoll ist kann man da auch noch vielviel mehr machen (z.B. Telemetriedaten jedes einzelnen Brushless-Relers abfragen).
Noch was unklar

--> Fragen!
Jörg
P.S.

- Cap-Sensor von Schorsch! Coole Sache!!!
- SANY0098.jpg (1.5 MiB) 4955 mal betrachtet