Dann sieht es so aus:
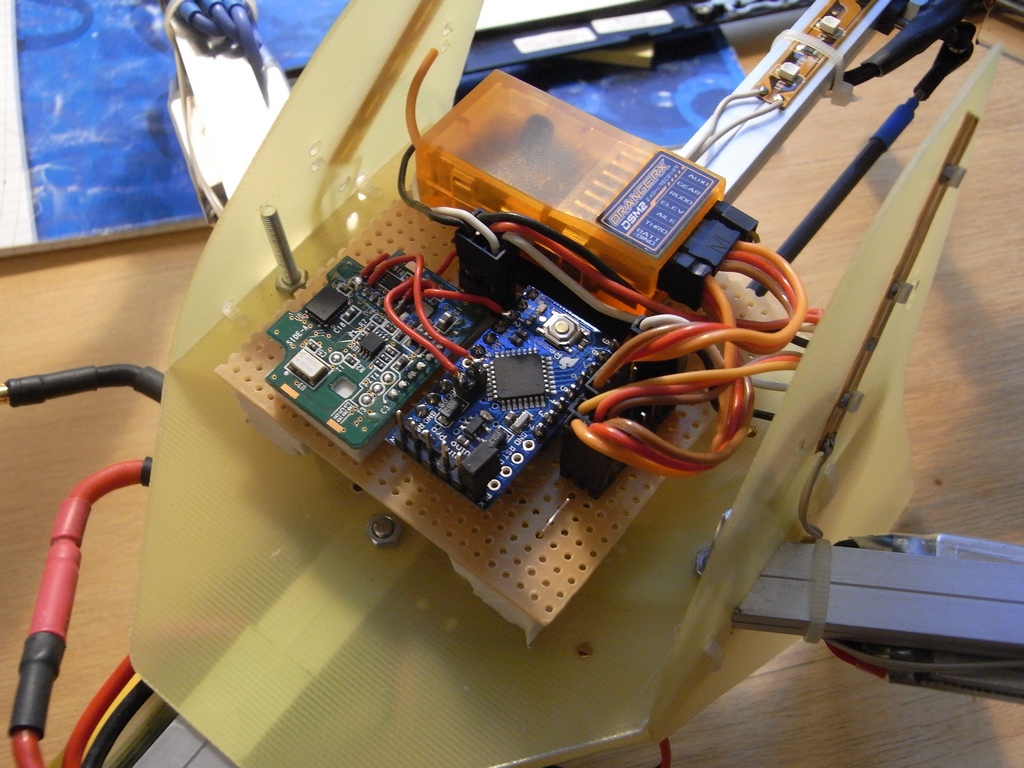
- Wiikopter.jpg (332.31 KiB) 1509 mal betrachtet
Bei mir hat auf Anhieb alles funktioniert (kenne ich so gar nicht

). Gestern haben wir das Arduino noch mit dem originalen FTDI Adapter programmiert, es geht aber auch mit meinem selbstgebastelten USB->Seriell->Max232 Kabel. Man muss dann nur im richtigen Moment den Resetknopf für den Bootloader drücken.
Im Betrieb kann man beliebig das Prog. Kabel an und abstecken um die Reglerparameter zu ändern, mit der Liveanzeige lassen sich die Sensordaten auswerten und man kann ähnlich zum VStabi 4.0 die Servowege und Mitten einstellen - sehr komfortabel!
Da ich mit meinem Tri im ggs. zum normal bekannten Aufbau "rückwärts" fliege, musste ich nur im Sender den Nick und Rollkanal reversen. In der SW muss man evtl. noch die Wirkrichtung vom Sensor anpassen.
Der erste Schwebeflug bei mir im Zimmer war äusserst erfolgreich, der Tri hebt absolut sauber und gerade ab, steht auf der Stelle wie festgenagelt. Ich freue mich schon auf den ersten Ausseneinsatz

Gewöhnungsbedürftig für mich war nur das Verhalten, dass der Tri nun nach dem "Scharfmachen" sofort die Rotoren anlaufen lässt - ich hoffe ich denke im Crashfall daran, dass ich nicht nur den Gashebel runterziehen muss, sondern auch noch nach links (zum kompletten abschalten)...




