ev. ist ja dem einen oder anderen entgangen, das es auch fertige Platinen gibt die man nicht mehr zerlöten muss.
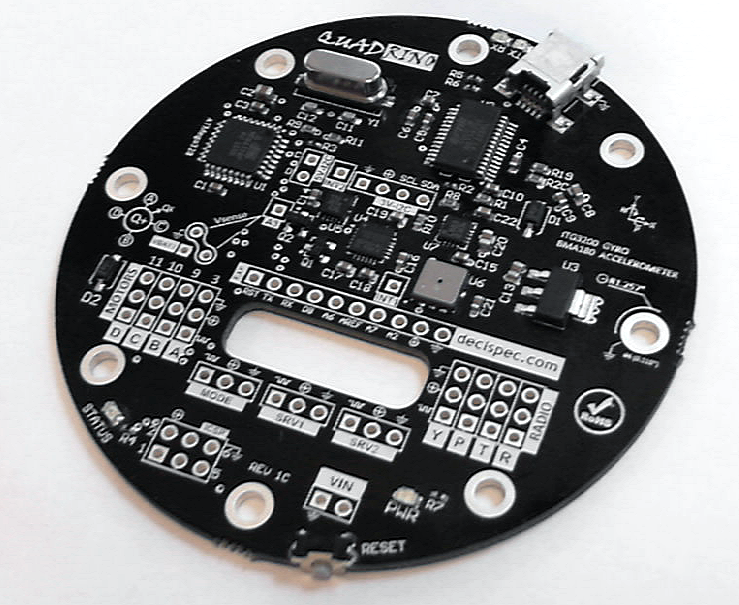
da gibt es den MWC mit Quadrino Muiltwii Flight controller von "witespy"
endlich mal eine fertige FC mit den besten sensoren, die zur zeit für einen MWC zur verfügung stehen.
und sogar ein USB-Adapter entfällt.
flickkram mit einer einzelnen IMU entfällt beim QUADRINO.
Und wahrscheinlich heißt das Ding QuadRino, weil man es für nen TriCopter in die Tonen kloppen kann. Ist ja ne nette Orientierungshilfe aufgedruckt, ich flieg aber X-Quad - und dann ?
Werd mir trotzdem das mal durchlesen, alles andere ist vorher eher spekulativ
_________________________________________________________________________________ "Leben ist das, was passiert, während du etwas ganz anderes planst" ... ( John Lennon )
Crizz hat geschrieben:weil man es für nen TriCopter in die Tonen kloppen kann. Ist ja ne nette Orientierungshilfe aufgedruckt, ich flieg aber X-Quad - und dann ?
Sollte kein Problem sein:
" * Uses stock MultiWii source code requiring only a few #define parameters to be set based on your setup."
Crizz hat geschrieben:Und wahrscheinlich heißt das Ding QuadRino, weil man es für nen TriCopter in die Tonen kloppen kann. Ist ja ne nette Orientierungshilfe aufgedruckt, ich flieg aber X-Quad - und dann ?
Dun nun wieder.
die schaltung ist die gleiche wie euer drahtverhau mit FreeIMU und ARDUINO. nur hier alles ohne flickkram.
ev. hast du ja noch nicht mitbekommen das die konfiguration in der software gemacht wird.
_____________________________________________________
oben geblieben, ...
ist noch keiner.
Günti hat geschrieben:ev. hast du ja noch nicht mitbekommen das die konfiguration in der software gemacht wird.
*ROFL*
Hat halt einen Schönheitsfehler, das Board : Die Runde Bauform ist beim Tricopter nicht unbedingt die beste Wahl. Ansonsten schon interessant was die Jungs auf die Beine stellen.
_________________________________________________________________________________ "Leben ist das, was passiert, während du etwas ganz anderes planst" ... ( John Lennon )
Ich finde die runde Bauform zwar für alles ab 4 Armen die ideale Lösung, weil man sie in 45°-Schritten montieren und so an jeden Rahmen anpassen kann. Allerdings würden mich mittlerweile die fest verbauten Sensoren stören. Nächste Woche gibt es was besseres und dann steht man doof da. Allerdings muss ich zugeben, dass dieses Board für Lötunkundige doch eine tolle Lösung ist.
@Crizz: Wie kommst du darauf, dass es nur für + und nicht für x taugen könnte? Das ist doch gerade DER Vorteil von runden Boards mit 8 Bohrungen.
Das Board ist schon klasse, fest verschrauben würde ich es aber lieber nicht. Dann wären die Sensoren absolut ungedämpft mit der Mechanik gekoppelt. Gerade das ist ja der feine Nebeneffekt des Wiiboards. Das muss man zwangsläufig per Tape entkoppeln.
Mein "Mainboard" ist dazu noch zusätzlich vom Rahmen per Tape entkoppelt, so dass ich mich NIE um Vibrationen kümmern musste. Ich fliege nun schon seit Ewigkeiten mit völlig kaputten Props, vollkommen verbogenen Motorwellen und kaputten Lagern rum - der Quad steht trotzdem vollkommen driftfrei und ruhig in der Luft (auch mit hohen P- und I-Werten)
Tilman, das war ein Schuß ins Blaue bevor ich mir den Rest durchgelesen habe. Ist für alle Confogs geeignet, zur Not sogar für nen BiCopter. Aber die Form läßt sich eben nicht überall gleichermaßen unterbringen, und ich baue kein Modell nach der Elektronik, sondern die Elektronik nach dem Modell - zumindest halt solange die Möglichkeit besteht. Bei meinem EDF-Tri wäre der EInsatz der runden Platine undenkbar. Da ist ein getrennter Arduino und IMU die bessere Lösung, respektive ein Board mit rechteckigem Grundmaß. Aber sowas sind Spezialfälle, und ich denke zu 90% wird ein rundes PCB kein Problem sein, da die Centerplates eh groß genug sind und es dann keinen Unterschied macht.
_________________________________________________________________________________ "Leben ist das, was passiert, während du etwas ganz anderes planst" ... ( John Lennon )
trailblazer hat geschrieben:Dann wären die Sensoren absolut ungedämpft mit der Mechanik gekoppelt. Gerade das ist ja der feine Nebeneffekt des Wiiboards. Das muss man zwangsläufig per Tape entkoppeln.
Bei Mikrokopter gibt es schöne gedämpfte Standoffs.
Geben tut es vieles
Mir wäre es wichtiger, das Board so klein wie nur möglich zu gestalten, damit man absolute Freiheit beim Design hat (so ähnlich wie Crizz das schon angesprochen hat).
Hier wird man wieder indirekt zu einem bestimmten Rahmenlayout "gezwungen", mich persönlich würde es einfach zuviel einschränken. Das ist aber mal wieder alles eine Frage des Gesamtkonzepts....
Hi
Ich bin auch einer dieser Lötunkundigen. Habe mich nicht zwischen dem Quadrino und dem Black Vortex entscheiden können und schlussentlich den Black Vortex (http://www.rcgroups.com/forums/showthread.php?t=1455433) genommen. Hoffentlich geht das gut
trailblazer hat geschrieben:Geben tut es vieles
Mir wäre es wichtiger, das Board so klein wie nur möglich zu gestalten,
und andererseits wieder masse anzupappen.
nicht umsonst haben die MEM's controller eine stahlplatte untergeklebt oder ein massives gehäuse aus alu, wie das MICRO BEAST.
.
_____________________________________________________
oben geblieben, ...
ist noch keiner.
trailblazer hat geschrieben:Geben tut es vieles
Mir wäre es wichtiger, das Board so klein wie nur möglich zu gestalten,
und andererseits wieder masse anzupappen.
nicht umsonst haben die MEM's controller eine stahlplatte untergeklebt oder ein massives gehäuse aus alu, wie das MICRO BEAST.
.
Ganz ehrlich - braucht kein Mensch! Ich weiss nicht, was andere da für einen Heckmeck drum machen. Ich muss dazu aber sagen, dass ich ohne Beschleunigungssensor fliege, denn den brauche ich einfach nicht Der Quad ist zum heizen und crashen da, ich seh das ähnlich wie Warthox.
Morphin hat geschrieben:
Ich bin auch einer dieser Lötunkundigen. Habe mich nicht zwischen dem Quadrino und dem Black Vortex entscheiden können und schlussentlich den Black Vortex (http://www.rcgroups.com/forums/showthread.php?t=1455433) genommen. Hoffentlich geht das gut
ob das sinn hat nen GPS auf dem gewöhnlichen ATMEGA zu implementieren, wage ich zu bezweifeln.
das wurde beim mikrokopter vor 2 jahren aufgegeben, es war einfach nicht die rechengeschwindigkeit für genaue berechnungen vorhanden.
und ich denke der arduino-compiler ist längst nicht so gut wie der, der extra für MK angepasst wurde. 40% schneller als die neuesten.
der neue GCC ist eher für modernere prozessoren optimiert, da fallen die spielzeugprozessoren hinten runter.
.
_____________________________________________________
oben geblieben, ...
ist noch keiner.
trailblazer hat geschrieben:
Ganz ehrlich - braucht kein Mensch! Ich weiss nicht, was andere da für einen Heckmeck drum machen. Ich muss dazu aber sagen, dass ich ohne Beschleunigungssensor fliege, denn den brauche ich einfach nicht Der Quad ist zum heizen und crashen da, ich seh das ähnlich wie Warthox.
zum glück hat jeder sein eigenes leiden.
.
_____________________________________________________
oben geblieben, ...
ist noch keiner.