#1 Selbstbau Quadrocopter mit Problemen
Verfasst: 16.03.2014 12:19:18
Hallo,
ich habe mir einen Quadrocopter selbst zusammen gebaut, allerdings habe ich das Problem, das er nicht fliegt bzw. nicht so fliegt, wie ich es möchte, da er wenn ich fliegen würde beim Beschleunigen ein Kleines stück hochfliegt und sich danach überschlägt und abstürzt.
Ich verwende das Multiwii and Megapirate AIO Flight Controller w/FTDI (ATmega 2560) V2.0(https://www.hobbyking.com/hobbyking/sto ... _V2_0.html
Zuerst hatte ich den Fehler, dass ich die Motor Drehrichtung vertauscht habe, darum ist zur Zeit keine Farbige Seite vorne, weil ich gedacht habe das Problem so beheben zu können, hat aber nichts gebracht.
Jetzt bin ich mir überhaupt nicht sicher was nun richtig ist und möchte hier einmal um Rat bitten.
Ich habe mich beim zusammen bauen grob an diese Anleitung gerichtet: http://fpv-community.de/showthread.php? ... omponenten
Dort ist unter anderem diese Bild, welches Zeit, wie die Motoren drehen müssen:
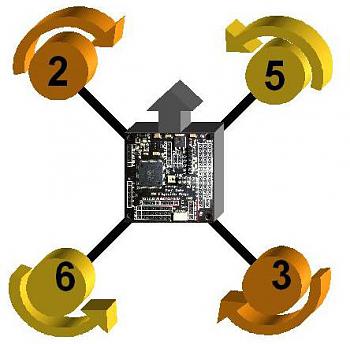
Er sollte jetzt auch so aufgebaut sein.
Hier einmal Bilder meines Aufbaus:
Einmal der komplette Quad ( Die Seite die nach ober geht ist im Moment vorne.) die Pfeile Zeigen die Drehrichtung an
Anhang: 2014-03-16 10.26.45.jpg Anhang: 2014-03-16 10.26.34.jpg
Und hier die Anschlüsse, an die Motoren:
Anhang: 2014-03-16 10.26.34.jpg
und hier meine Konfiguration:
Bei der Konfiguration war ich mir auch nicht sicher, welches Board ich verwenden soll ich habe dort MultiWii_32U4_SE_no_baro ausgewählt ist das korrekt?
Ich hoffe ihr könnt mir Helfen meinen Denkfehler zu finden.
mfg Yannik
ich habe mir einen Quadrocopter selbst zusammen gebaut, allerdings habe ich das Problem, das er nicht fliegt bzw. nicht so fliegt, wie ich es möchte, da er wenn ich fliegen würde beim Beschleunigen ein Kleines stück hochfliegt und sich danach überschlägt und abstürzt.
Ich verwende das Multiwii and Megapirate AIO Flight Controller w/FTDI (ATmega 2560) V2.0(https://www.hobbyking.com/hobbyking/sto ... _V2_0.html
Zuerst hatte ich den Fehler, dass ich die Motor Drehrichtung vertauscht habe, darum ist zur Zeit keine Farbige Seite vorne, weil ich gedacht habe das Problem so beheben zu können, hat aber nichts gebracht.
Jetzt bin ich mir überhaupt nicht sicher was nun richtig ist und möchte hier einmal um Rat bitten.
Ich habe mich beim zusammen bauen grob an diese Anleitung gerichtet: http://fpv-community.de/showthread.php? ... omponenten
Dort ist unter anderem diese Bild, welches Zeit, wie die Motoren drehen müssen:
Er sollte jetzt auch so aufgebaut sein.
Hier einmal Bilder meines Aufbaus:
Einmal der komplette Quad ( Die Seite die nach ober geht ist im Moment vorne.) die Pfeile Zeigen die Drehrichtung an
Anhang: 2014-03-16 10.26.45.jpg Anhang: 2014-03-16 10.26.34.jpg
Und hier die Anschlüsse, an die Motoren:
Anhang: 2014-03-16 10.26.34.jpg
und hier meine Konfiguration:
Bei der Konfiguration war ich mir auch nicht sicher, welches Board ich verwenden soll ich habe dort MultiWii_32U4_SE_no_baro ausgewählt ist das korrekt?
Ich hoffe ihr könnt mir Helfen meinen Denkfehler zu finden.
mfg Yannik